|
╗∙ė┌SimulinkĄ─öĄ(sh©┤)┐žÖC┤▓Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)Ą─Į©─Ż┼cĘ┬šµ
ĮŁ╠K╩Ī╚ń¢|ųąĄ╚īŻśI(y©©)īW(xu©”)ąŻ ═§Š┼Ė▀ĪĪ2017/4/6 10:17:15
ĪĪĪĪ š¬ę¬Ż║┐ŲīW(xu©”)╝╝ąg(sh©┤)Ą─▓╗öÓ░l(f©Ī)š╣Ż¼×ķ╬ęć°╣żśI(y©©)Įø(j©®ng)Ø·Ą─│ų└m(x©┤)į÷╝ė╠ß╣®┴╦ųžę¬Ą─╝╝ąg(sh©┤)ų¦│ų����Ż¼ā×(y©Łu)╗»ŽÓĻP(gu©Īn)įO(sh©©)éõ╣żū„ąį─▄Ą─═¼Ģr▒Ż│ų┴╦╣żśI(y©©)╔·«a(ch©Żn)Ė▀ą¦ąįĪŻ«ö(d©Īng)Ū░öĄ(sh©┤)┐žÖC┤▓Ą─īŹļHæ¬(y©®ng)ė├ĘČć·š²į┌öU┤¾����Ż¼Ųõ╦┼Ę■ŽĄĮy(t©»ng)īŹļHū„ė├Ą─│õĘų░l(f©Ī)ō]Ż¼ėą└¹ė┌═Ļ╔ŲÖC┤▓Ą─Ę■äš(w©┤)╣”─▄�ĪŻę“┤╦Ż¼▒Š╬─Š═╗∙ė┌SimulinkĄ─
ĪĪĪĪ
öĄ(sh©┤)┐žÖC┤▓Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)Ą─Į©─Ż┼cĘ┬šµš╣ķ_šō╩÷�ĪŻ
ĪĪĪĪ
ĻP(gu©Īn)µIį~Ż║SimulinkŻ╗öĄ(sh©┤)┐žÖC┤▓��Ż╗Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)Ż╗Į©─Ż��Ż╗Ę┬šµ
ĪĪĪĪ
ĪĪĪĪ
×ķ┴╦īŹ¼F(xi©żn)öĄ(sh©┤)┐žÖC┤▓╩╣ė├╣”─▄Ą─▓╗öÓā×(y©Łu)╗»�����Ż¼▒Ż│ųŲõīŹļH╣żū„Ė▀ą¦ąį����Ż¼æ¬(y©®ng)ūóųž╗∙ė┌SimulinköĄ(sh©┤)┐žÖC┤▓Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)Ą─Į©─Ż┼cĘ┬šµĪŻīŹļH▓┘ū„ųąæ¬(y©®ng)ĮY(ji©”)║ŽSimulinkū„ė├Ž┬öĄ(sh©┤)┐žÖC┤▓Ą─ĮM│╔ĮY(ji©”)śŗ(g©░u)╝░Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)Ą─īŹļHū„ė├�����Ż¼┐╝æ]Ė„ĘĮ├µĄ─ė░Ēæ┤_▒ŻįōŽĄĮy(t©»ng)Į©─Ż┼cĘ┬šµėąą¦ąį�����Ż¼īŹ¼F(xi©żn)╣żśI(y©©)╔·«a(ch©Żn)ą¦ęµūŅ┤¾╗»Ą─ķLŲ┌░l(f©Ī)š╣─┐ś╦(bi©Īo)�ĪŻ
ĪĪĪĪ
ę╗ĪóöĄ(sh©┤)┐žÖC┤▓▀MĮo╦┼Ę■ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═Ęų╬÷
ĪĪĪĪ
×ķ┴╦╩╣öĄ(sh©┤)┐žÖC┤▓▀MĮoŽĄĮy(t©»ng)─▄ē“ķLŲ┌╠Äė┌ĘĆ(w©¦n)Č©Ą─▀\ąąĀŅæB(t©żi)����Ż¼▒Ż│ųŽĄĮy(t©»ng)┴╝║├Ą─▀\ąą╦«ŲĮŻ¼ąĶ꬜ŗ(g©░u)Į©│÷ŽÓĻP(gu©Īn)Ą─öĄ(sh©┤)īW(xu©”)─Żą═ī”▀MĮoŽĄĮy(t©»ng)Ą─ąį─▄┐╔┐┐ąį▀MąąĘų╬÷�����ĪŻįō─Żą═░³└©┴╦Ż║ÖCąĄé„äėŽĄĮy(t©»ng)┼c╦┼Ę■“ī(q©▒)äėŽĄĮy(t©»ng)ĪŻŽÓī”Č°čį����Ż¼Ū░š▀▌^×ķÅ═(f©┤)ļsŻ¼ąĶę¬įO(sh©©)ų├Ė„ĘNģóöĄ(sh©┤)����Ż╗║¾š▀į┌╦┘Č╚┐žųŲ┼c╬╗ų├┐žųŲĘĮ├µŲų°ųžę¬Ą─▒ŻšŽū„ė├ĪŻįōöĄ(sh©┤)īW(xu©”)─Żą═Į©┴ó▀^│╠ųą░³└©┴╦╦┘Č╚┐žųŲ���Īó╬╗ų├┐žųŲ╝░ÖCąĄé„äėĮY(ji©”)śŗ(g©░u)Ą╚�ĪŻ═©▀^ī”▓╗═¼ĮM│╔▓┐ĘųĄ─ėąą¦Ęų╬÷����Ż¼×ķöĄ(sh©┤)┐žÖC┤▓▀MĮo╦┼Ę■ŽĄĮy(t©»ng)śŗ(g©░u)Į©╠ß╣®┴╦▒žę¬Ą─ģó┐╝ą┼Žó��ĪŻöĄ(sh©┤)┐žÖC┤▓▀MĮo╦┼Ę■ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═╚ńłD1╦∙╩Š����ĪŻ
ĪĪĪĪ
ĪĪĪĪ
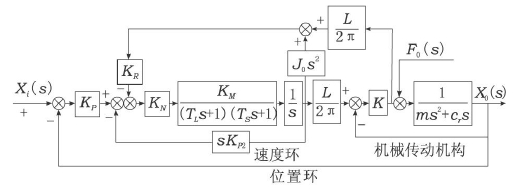
łD1 öĄ(sh©┤)┐žÖC┤▓▀MĮo╦┼Ę■ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═
ĪĪĪĪ
łD1ųą╬╗ų├┐žųŲé„▀fģóöĄ(sh©┤)ė├KP▒Ē╩ŠŻ╗╦┘Č╚Ę┤üį÷굎ĄöĄ(sh©┤)ė├KP2▒Ē╩Š����Ż╗╦┘Č╚┐žųŲé„▀f║»öĄ(sh©┤)ė├KN▒Ē╩Š����Ż╗ļŖÖCį÷굎ĄöĄ(sh©┤)ė├KM▒Ē╩Š�Ż╗ļŖÖCÖCąĄĢrķg│ŻöĄ(sh©┤)ė├TL▒Ē╩ŠŻ╗ļŖÖCļŖŲ„Ģrķg│ŻöĄ(sh©┤)ė├TS▒Ē╩Š�Ż╗ÅŚąįŽĄöĄ(sh©┤)ė├k▒Ē╩ŠŻ╗ØLųķĮzĖ▄┼c╣żū„┼_Ž“ØLųķĮzĖ▄▐D(zhu©Żn)╗»▀^│╠ųą«a(ch©Żn)╔·Ą─▐D(zhu©Żn)äėæT┴┐ė├JO▒Ē╩Š����Ż╗ÅŚąįūāą╬┴┐┼cł╠(zh©¬)ąą▓┐╝■┘|(zh©¼)┴┐Ęųäeė├L┼cm▒Ē╩ŠŻ╗ī¦(d©Żo)▄ēĖ▒╔ŽŠ▀ėąę╗Č©š│ąįĄ─ūĶ─ߎĄöĄ(sh©┤)ė├Cr▒Ē╩Š�����Ż╗ÖCąĄé„äėŽĄĮy(t©»ng)Ą─═Ō▌d║╔ė├F0▒Ē╩Š���ĪŻ═©▀^▀@ą®ģóöĄ(sh©┤)Ą─║Ž└ĒįO(sh©©)ų├��Ż¼┐╔ęįīŹ¼F(xi©żn)öĄ(sh©┤)┐ž▀MĮo╦┼Ę■ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═śŗ(g©░u)Į©��ĪŻĮY(ji©”)║ŽłD1╦∙╩ŠĄ─╦┼Ę■ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═����Ż¼┐╔Ą├ĄĮįōŽĄĮy(t©»ng)┐éĄ─é„▀f║»öĄ(sh©┤)GŻ©sŻ®Ż║
ĪĪĪĪ

ĪĪĪĪ
═©▀^ī”╩ĮŻ©1Ż®é„▀f║»öĄ(sh©┤)GŻ©sŻ®Ą─║Ž└Ē▀\ė├Ż¼┐╔ęįī”╦┘Č╚┐žųŲ�Īó╬╗ų├┐žųŲ╝░é„äėÖCśŗ(g©░u)Ą╚Łh(hu©ón)╣Ø(ji©”)▀Mąąėąą¦Ą─Ęų╬÷Ż¼┤_▒ŻöĄ(sh©┤)┐žÖC┤▓╦┼Ę■ŽĄĮy(t©»ng)ķLŲ┌╩╣ė├ųąĄ─▀\ąą┴╝║├ąį��ĪŻį┌╦┼Ę■ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═Ą─ų¦│ųŽ┬����Ż¼╔Ņ╚ļ└ĒĮŌé„▀f║»öĄ(sh©┤)GŻ©sŻ®Ą─ā╚(n©©i)║ŁŻ¼┐╔ęį×ķöĄ(sh©┤)┐žÖC┤▓╦┼Ę■ŽĄĮy(t©»ng)ąį─▄Ą─ā×(y©Łu)╗»╠ß╣®▒ŻšŽ���ĪŻ
ĪĪĪĪ
Č■�Īó╗∙ė┌SimulinkĄ─öĄ(sh©┤)┐žÖC┤▓Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)Ą─Į©─Ż┼cĘ┬šµĘų╬÷
ĪĪĪĪ
═©▀^ī”öĄ(sh©┤)┐žÖC┤▓╦┼Ę■ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═╝░é„▀f║»öĄ(sh©┤)GŻ©sŻ®Ą─Ęų╬÷���Ż¼┐╔ų¬įōöĄ(sh©┤)īW(xu©”)─Żą═×ķ╬ÕļA����ĪŻ▀\ė├é„Įy(t©»ng)Ą─ĘĮĘ©ī”▀MąąĘų╬÷ąŻ“×ųąė╔ė┌║÷┬į┴╦─│ą®ąĪųĄģóöĄ(sh©┤)��Ż¼▓óīóŽĄĮy(t©»ng)║å╗»×ķŪĘūĶ─ßČ■ļAŽĄĮy(t©»ng)▀MąąĘų╬÷�����Ż¼ų┬╩╣ūŅĮKŽĄĮy(t©»ng)Ą─öM║ŽŠ½Č╚ļyęį▀_ĄĮöĄ(sh©┤)┐žÖC┤▓š²│Ż╣żū„ę¬Ū¾����Ż¼ļyęįĮ©┴óĖ„ģóöĄ(sh©┤)ų«ķgĄ─ĻP(gu©Īn)ŽĄĪŻ×ķ┴╦▒▄├Ō▀@ĘN¼F(xi©żn)Ž¾Ą─│÷¼F(xi©żn)���Ż¼ąĶę¬ī”╦┼Ę■ŽĄĮy(t©»ng)Ė▀ļAöĄ(sh©┤)īW(xu©”)─Żą═▀MąąäėæB(t©żi)Ęų╬÷����Ż¼┤_▒Ż╦┼Ę■ŽĄĮy(t©»ng)Ą─ĘĆ(w©¦n)Č©▀\ąą��ĪŻį┌ī”ŽĄĮy(t©»ng)öĄ(sh©┤)īW(xu©”)─Żą═▀MąąäėæB(t©żi)Ęų╬÷Ģr����Ż¼æ¬(y©®ng)ūóųž¼F(xi©żn)┤·įO(sh©©)ėŗĘĮĘ©┼cé„Įy(t©»ng)įO(sh©©)ėŗĘĮĘ©Ą─┼õ║Ž╩╣ė├ĪŻŽÓ▒╚é„Įy(t©»ng)įO(sh©©)ėŗĘĮĘ©���Ż¼¼F(xi©żn)┤·įO(sh©©)ėŗĘĮĘ©╩╣ė├▓ó╬┤īóĖ„ĘNĮø(j©®ng)“×╣½╩Į����ĪółD▒Ē╝░╩ųāįū„×ķų„ꬥ─ģó┐╝ę└ō■(j©┤)��Ż¼Č°╩Ū═©▀^ī”ėŗ╦ŃÖC┼cą┼Žó╝╝ąg(sh©┤)Ą─║Ž└Ē▀\ė├�Ż¼ī”öĄ(sh©┤)┐žÖC┤▓╦┼Ę■Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)▀MąąĮ©─Ż┼cĘ┬šµŻ¼Å─Č°½@Ą├┐╔┐┐Ą─Ęų╬÷ĮY(ji©”)╣¹Ż¼ØMūŃ╦┼Ę■ŽĄĮy(t©»ng)š²│Ż▀\ąąĄ─īŹļHąĶŪ¾�����ĪŻ
ĪĪĪĪ
▀\ė├╗∙ė┌SimulinkĄ─äėæB(t©żi)Ęų╬÷įO(sh©©)ėŗĘĮĘ©�����Ż¼Ųõā×(y©Łu)³c░³└©Ż║─▄ē“į┌┐╔ęĢ╗»Ą─ŲĮ┼_ų¦│ųŽ┬▀\ąąĖ„ĘNłDą╬│╠ą“���Ż¼Å─Č°╔·«a(ch©Żn)Š▀ėą┤·▒ĒąįĄ─ĘĮ┐“łD��Ż¼▀MČ°Į©┴ó┼c╦┼Ę■ŽĄĮy(t©»ng)ŽÓĻP(gu©Īn)Ą─Ę┬šµ─Żą═�Ż¼īŹ¼F(xi©żn)ī”Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)Ą─äėæB(t©żi)Ęų╬÷��Ż¼ūŅĮKĄ├ĄĮ▒Ńė┌ė^▓ņĘų╬÷Ą─ĢrķgĒææ¬(y©®ng)Ū·ŠĆ��ĪŻŽ±ėŗ╦ŃÖC����Īó┐╔ęĢ╗»ŲĮ┼_ū„ė├Ž┬╔·│╔Ą─BodełDĪóNyquistłDĄ╚▒Ē╩ŠŅlė“╠žąįĄ─Ū·ŠĆ�����Ż¼─▄ē“×ķŽĄĮy(t©»ng)Ą─äėæB(t©żi)Ęų╬÷╠ß╣®ģó┐╝ę└ō■(j©┤)�����ĪŻ┼c┤╦═¼Ģr�����Ż¼į┌┐╔┐┐Ą─╦┼Ę■ŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)┐žųŲĘ┬šµ─Żą═ų¦│ųŽ┬�Ż¼┐╔ęįīŹ¼F(xi©żn)öĄ(sh©┤)┐žÖC┤▓╦┼Ę■ļŖÖCĪóé„äėÖCśŗ(g©░u)Ą╚śŗ(g©░u)╝■Ą─äėæB(t©żi)─ŻöMĘų╬÷�Ż¼▓ó═©▀^Ė─ūāŽÓĻP(gu©Īn)Ą─ģóöĄ(sh©┤)Ą├ĄĮ╦┼Ę■ŽĄĮy(t©»ng)į┌▓╗═¼ģóöĄ(sh©┤)Ž┬Ą─Ė„ĘN╠žąįĘų╬÷ĮY(ji©”)╣¹Ż¼┤_▒ŻĘ┬šµ╦ŃĘ©Ą─▀xō±ėąą¦ąį��ĪŻ
ĪĪĪĪ
╗∙ė┌SimulinkĄ─öĄ(sh©┤)┐žÖC┤▓Ė▀ļA╦┼Ę■ŽĄĮy(t©»ng)Ą─Į©─Ż����Ż¼æ¬(y©®ng)Å─▀@ą®ĘĮ├µ╚ļ╩ųŻ║Ż©1Ż®Ė∙ō■(j©┤)╦┼Ę■ŽĄĮy(t©»ng)ĮY(ji©”)śŗ(g©░u)┐žųŲ┴„│╠Ż¼śŗ(g©░u)Į©│÷ŽÓĻP(gu©Īn)Ą─Ę┬šµ─Żą═�ĪŻįō─Żą═ųąæ¬(y©®ng)░³║¼╦┘Č╚Łh(hu©ón)é„▀f║»öĄ(sh©┤)Īó╬╗ų├Łh(hu©ón)é„▀f║»öĄ(sh©┤)����ĪóÖCąĄé„äėĮY(ji©”)śŗ(g©░u)é„▀f║»öĄ(sh©┤)Ą╚Ż╗Ż©2Ż®ĮY(ji©”)║ŽĖ▀ļA╦┼Ę■ŽĄĮy(t©»ng)äėæB(t©żi)╠žąįĄ─Ė„éĆģóöĄ(sh©┤)�����Ż¼īóöĄ(sh©┤)┐žÖC┤▓Ą─╦┼Ę■▀MĮo▓┐ĘųĄ─Ė„éĆÖCļŖģóöĄ(sh©┤)░┤šš║Ž└ĒĄ─ĘĮ╩Į┤·╚ļĄĮŽĄĮy(t©»ng)─Żą═ųąŻ¼ūŅĮK½@Ą├─▄ē“▒Ē╩ŠŽĄĮy(t©»ng)Ė„Łh(hu©ón)╣Ø(ji©”)Ą─é„▀f║»öĄ(sh©┤)����Ż¼▀MČ°ī”é„▀f║»öĄ(sh©┤)▀MąąĘų╬÷Ż╗Ż©3Ż®į┌┐╔ęĢ╗»ŲĮ┼_Ą─ų¦│ųŽ┬�Ż¼½@╚ĪSimulinkĘ┬šµłDŻ¼īŹ¼F(xi©żn)öĄ(sh©┤)┐žÖC┤▓Ė▀ļA╦┼Ę■ŽĄŻ©╬┤═Ļ����Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|