|
░╝ąąäė(d©░ng)╬ü▌å┼cöĄ(sh©┤)īW(xu©”)─Żą═║═²X├µļp²X╔Ņ
┘Yį┤╠ņŽ┬ĪĪ2018/1/26 8:56:24
ĪĪĪĪ [š¬ę¬]Ż║į┌▀@ĒŚ(xi©żng)蹊┐ųąŻ¼Į©ūh░╝▓┐Ą─äė(d©░ng)ū„Ż©RAŻ®Ą─╬ü▌å┼cļp╔ŅČ╚č└²X▒Ē├µĘĮ│╠ė╔ZN╬üŚUą═ØLĄČ«a(ch©Żn)╔·�ĪŻ╗∙ė┌╦∙╩÷╔·│╔ÖC(j©®)ųŲ║═žō(f©┤)é∙Ą─└Ēšō����Ż¼ę╗ŽĄ┴ąĄ─╬ü▌åŻ¼░ļRA���Ż¼RA╚½├µĄ─öĄ(sh©┤)īW(xu©”)─Żą═��Ż¼▓óś╦(bi©Īo)£╩(zh©│n)▒╚└²²XŅÉ(l©©i)ą═���Ż¼ęįļp²X╔ŅČ╚ķ_(k©Īi)░l(f©Ī)╣”─▄ė├ū„įōZN╬üŚUą═ØLĄČįO(sh©©)ėŗ(j©¼)ģóöĄ(sh©┤)Ą─įO(sh©©)ėŗ(j©¼)╣”─▄ĪŻĖ∙ō■(j©┤)ī¦(d©Żo)│÷Ą─²X├µĘĮ│╠ųąę╗ŽĄ┴ąĄ─╬ü▌å┼cļp²X╔ŅČ╚▀M(j©¼n)ąąėŗ(j©¼)╦ŃÖC(j©®)łDą╬└LųŲ���ĪŻ ę▓蹊┐┴╦ė╔ė┌į┌▓╗═¼Ą─╣Ø(ji©”)ŠĆ�Ż¼ē║┴”╦∙«a(ch©Żn)╔·Ą─RA╬ü▌å²X├µĄ─ūā╗» ĮŪ║═ØLĄČĄ─²XĖ▀����ĪŻ
ĪĪĪĪ
[ĻP(gu©Īn)µIį~]Ż║ ░╝ąąäė(d©░ng) ļp²X╔Ņ RA╬ü▌å ²X├µūā╗»
ĪĪĪĪ
1.ę²čį
ĪĪĪĪ
²X▌åČÓöĄ(sh©┤)╩Ūė├üĒ(l©ói)é„▌ö╣”┬╩╗“▐D(zhu©Żn)Šž�ĪŻę╗ą®²X▌å�Ż¼╚ń╦„ę²²X▌åŻ¼▀mė├ė┌░l(f©Ī)╔õŠ½┤_┐žųŲĮŪ▀\(y©┤n)äė(d©░ng)Ą½é„▀f╣”┬╩╗“┼żŠž│╔×ķ╦¹éāĄ─┤╬ę¬┐╝æ]����ĪŻę╗ą®╦„ę²²X▌å═©│Ż╣żū„į┌┬Č╠ņŻ¼╗“ų╗ė├ų¼ØÖ(r©┤n)╗¼��Ż¼╠žäe╩Ūė├ė┌“ī(q©▒)äė(d©░ng)▄Ŗė├╬õŲ„��Ż¼╔õļŖ═¹▀h(yu©Żn)ńR��Ż¼ąl(w©©i)ąŪĖ·█Ö╠ņŠĆĄ╚�Ż¼╦³éāąĶę¬▌^Ą═Ą──”▓┴Ą─Śl╝■Ž┬▀\(y©┤n)ąąŻ¼▒╚═¼Ą╚Ė³ŲĮ╗¼║═ĘĆ(w©¦n)Č©²X▌å��ĪŻ▒Ŗ╦∙ų▄ų¬░╝▓┐Ą─äė(d©░ng)ū„Ą─²X▌åŻ©┐sīæ(xi©¦)×ķRA²X▌åŻ®ėą▌^╔┘Ą──źōp┼cĄ═─”▓┴║═Ą═įļ궥─�����ĪŻ░ūĮØhīmĮŌßī×ķ░╝ąąäė(d©░ng)─”▓┴┴”▒╚ąąäė(d©░ng)ĘĮßśĢr(sh©¬)Ą═²X▌åć¦║ŽųąĄ═���ĪŻ░ūĮØhīmę▓▒Ē├„Ż¼╬ü▌åé„äė(d©░ng)�����Ż¼╔Ņ²XłAų∙╬üŚUé„äė(d©░ng)Ż¼▒╗Delava Holroyd╦∙ųŲįņė├üĒ(l©ói)į┌ųž200ėó┤ńųąĄ─Š½┤_ą²▐D(zhu©Żn)�ĪŻ┼┴┬Õ±R═¹▀h(yu©Żn)ńRŻ¼╦³ę▓▒╗æ¬(y©®ng)ė├ĄĮ┤¾ĘČć·Ą─░l(f©Ī)¼F(xi©żn)š▀����ĪŻ▀@╬ü▌åé„äė(d©░ng)╩ŪŅÉ(l©©i)╦Ųė┌ī”(du©¼)┴„ą═Ą─Ż¼Ą½╦³īŹ(sh©¬)ļH╔Ž╩Ūą▐Ė─│╔ę╗éĆ(g©©)═Ļš¹Ą─RA╬ü▌åé„äė(d©░ng)ļp╔Ņ╚ļč└²X║═Ą═ē║┴”ĮŪ���ĪŻ┼cé„Įy(t©»ng)ą═╬ü▌åé„äė(d©░ng)����Ż¼▀@ą®ą▐Ė─▒╚▌^ī¦(d©Żo)ų┬į┌Įėė|║═Ė▀░╝▓█äė(d©░ng)ū„šTī¦(d©Żo)Ą═─”▓┴┤¾┴┐Ą─č└²X����ĪŻ▓╗āHČÓ²X├µĮėė|Ą─║├╠Ä£p╔┘▀\(y©┤n)äė(d©░ng)š`▓ŅŻ¼Č°ŪęŲĮŠ∙╦∙ėą²Xš`▓ŅĄ─┐é║═�ĪŻ CrosherĮŌßī×ķ²X▌åÅSOTTį┌Ą┬ć°(gu©«)ęčĮø(j©®ng)ķ_(k©Īi)░l(f©Ī)│÷┴╦Š▀ėą▌^ąĪĄ─ķgŽČ╬ü▌å²X▌åĮMŻ¼ęį╝░OTTĄ─ęÄ(gu©®)Ė±ę▓ØMūŃminimumtotalÅ═(f©┤)║Žš`▓Ņį┌Š½┤_Č©╬╗�ĪŻ╦³éā▒╗įO(sh©©)ėŗ(j©¼)│╔ęįŠ▀ėąŠ∙ä“║═║ŃČ©Įėė|Ą─ĘŪ│ŻĖ▀Ą─Įėė|▒╚Ż©CRŻ®ĪŻ▀@┐╔ęįė├Ą═ē║┴”ĮŪ���Ż¼ĘŪ│ŻķL(zh©Żng)²X├µ║═┤¾┴┐Ą─╬ü▌å²XĄ╚����Ż¼Ą½╩ŪŻ¼┐╔ęįīŹ(sh©¬)¼F(xi©żn)▒ŠŽ▐ųŲ╩Ūį┌¬MšŁĄ─²XĄ─ĒöČ╦║═╬üŚU┬▌ą²����ĪŻ Shigley║═MischkeČ©┴xĄ─ę╗éĆ(g©©)²X▌åī”(du©¼)Ą─CR×ķč└²XĮėė|²X▌åć¦║Ž▀^(gu©░)│╠ųąŲĮŠ∙öĄ(sh©┤)ĪŻę“┤╦�Ż¼ RAĄ─╬ü▌å╬üŚUé„äė(d©░ng)Ą─CR┐╔═©▀^(gu©░)ėŗ(j©¼)╦Ńę╗éĆ(g©©)²X▌å²XĄ─ą²▐D(zhu©Żn)ĮŪČ╚Ż¼Å─ķ_(k©Īi)╩╝Įėė|³c(di©Żn)╠Ä£y(c©©)┴┐ĄĮĄ─┐╔ęį═©▀^(gu©░)ęįŽ┬ĘĮ╩Įėŗ(j©¼)╦ŃĄ─Č╦▓┐Įėė|³c(di©Żn)æ¬(y©®ng)ė├²X├µĮėė|Ęų╬÷Ż© TCA Ż®Ą─ĮY(ji©”)╣¹�����Ż¼ė╔ā╔éĆ(g©©)▀B└m(x©┤)Ą─²Xą╬│╔Ą─ĮŪČ╚äØĘų
ĪĪĪĪ
ĪĪĪĪ
░ūĮØhīm╠ß│÷╚ń║╬įO(sh©©)ėŗ(j©¼)RA╬ü▌å�ĪŻŚŅ╠ß│÷┴╦ę╗ĘNĮ╗╗ź╩Įėŗ(j©¼)╦ŃÖC(j©®)łDą╬│╠ą“╔Ļšł(q©½ng)ĄĮūŅ╝čĄ─RA²X▌åįO(sh©©)ėŗ(j©¼)ĪŻ╬„ę«ĖĻ?du©¼)¢║═±Räeķ_(k©Īi)░l(f©Ī)┴╦ę╗ĘNĘĮĘ©�����Ż¼ūŅ┤¾Ž▐Č╚Ąž░╝ąąäė(d©░ng)Ą─▒╚└²ĮėĮ³ąąäė(d©░ng)═©▀^(gu©░)┤_Č©å╬éĆ(g©©)ØLĄČŲ½ęŲę╗ī”(du©¼)š²²X▌åįO(sh©©)ėŗ(j©¼)×ķĘŪś╦(bi©Īo)£╩(zh©│n)Ą─ųąą─ŠÓüĒ(l©ói)▓┘ū„����ĪŻ├Ž║═ĻÉ蹊┐┴╦└Ēšō║═īŹ(sh©¬)“×(y©żn)Ą─╚½RA²X▌å─═▓┴é¹ąį����Ż¼┼c░ļRAĄ─ś╦(bi©Īo)£╩(zh©│n)▒╚▌^�����ĪŻ╦³╦Ų║§│õØMRA²X▌å┐╔─▄Ž▓ÜgĄ──═³c(di©Żn)╬gąį─▄║═╦▄ąį┴„äė(d©░ng)ĀŅæB(t©żi)����Ż¼─═▓┴é¹ąįį┌─│ą®│╠Č╚Ė▀ė┌Ųõ╦¹╚╦���ĪŻ Wildhaber╩╣ė├Ą─▒Ē├µŪ·┬╩��Ż¼ęį½@Ą├Į³╦ŲĄ─²X├µĮėė|ę╗ą®╬üŚUė╔╠ž┤¾ą═ØLĄČĄČŠ▀«a(ch©Żn)╔·Ą─²X▌å����ĪŻWilkesmann���Ż¼ęį╝░▓®╩└╠ß│÷┴╦▓╗═¼Ą─ĘĮĘ©üĒ(l©ói)½@Ą├Ė³Š½├▄╬ü▌åé„äė(d©░ng)├µ��ĪŻĘĮų█ūė║═ūļķ_(k©Īi)░l(f©Ī)┴╦│ŻęÄ(gu©®)╬ü▌åé„äė(d©░ng)Ą─öĄ(sh©┤)īW(xu©”)─Żą═����ĪŻĄĮ¼F(xi©żn)į┌×ķų╣�����Ż¼ų╗ėą║▄╔┘Ą─蹊┐ęčĮø(j©®ng)蹊┐┴╦į┌RAĄ─╬ü▌åĪŻ╚╗Č°��Ż¼öĄ(sh©┤)īW(xu©”)─Żą═��Ż¼ėŗ(j©¼)╦ŃÖC(j©®)─ŻöM����Ż¼²X├µĮėė|Ęų╬÷║═RAĄ─╬ü▌å²X▌åæ¬(y©®ng)┴”Ęų╬÷Č╝╔ą╬┤▒╗蹊┐ĪŻ▒Š╬─Ą──┐Ą─╩ŪųŲČ©Ą─RA╬ü▌å┼cļp²X╔ŅĄ─öĄ(sh©┤)īW(xu©”)─Żą═����ĪŻĖ∙ō■(j©┤)RAĄ─╔·│╔ÖC(j©®)ųŲ╬ü▌å╬üŚU£p╦┘ÖC(j©®)║═é„äė(d©░ng)čbų├Ą─└ĒšōŻ¼ī”(du©¼)RA╬üŚU²X▌åĄ─öĄ(sh©┤)īW(xu©”)─Żą═┐╔ęįėŗ(j©¼)╦Ń│÷üĒ(l©ói)����ĪŻ╚²ĘNŅÉ(l©©i)ą═Ą─╬ü▌å²XŻ¼░ļRA ����Ż¼╚½RA║═ś╦(bi©Īo)£╩(zh©│n)▒╚└²č└Ż¼į┌▀@ĒŚ(xi©żng)蹊┐ųą��Ī����Ż╗∙ĄA(ch©│)╔Ž░l(f©Ī)š╣öĄ(sh©┤)īW(xu©”)─Żą═Ż¼░ļRA ���Ż¼╚½RA║═ś╦(bi©Īo)£╩(zh©│n)▒╚└²²X╬ü▌åĄ─ėŗ(j©¼)╦ŃÖC(j©®)łDą╬┐╔ęį└LųŲĄ─RAĄ─╬ü▌å²X²X├µĄ─ūā╗»�Ż¼▀Ć蹊┐ė╔ė┌▓╗═¼Ą─╣Ø(ji©”)ŠĆ����Ż¼ē║┴”ĮŪ║═ØLĄČĄ─²XĖ▀ĪŻ▒ŠčąŠ┐Ą─ĮY(ji©”)╣¹┐╔ė├ė┌▀M(j©¼n)ę╗▓Įš{(di©żo)▓ķ���Ż¼²X├µĮėė|Ęų╬÷�Ż¼▀\(y©┤n)äė(d©░ng)š`▓Ņ���Ż¼┬ō(li©ón)ŽĄ┬ĘÅĮ║═░ļRA ��Ż¼╚½RA║═ś╦(bi©Īo)£╩(zh©│n)▒╚└²²X╬ü▌å╬üŚUé„äė(d©░ng)Ą─Įėė|─Ż╩Į
ĪĪĪĪ
2.ąąäė(d©░ng)ĘĮĘ©║═░╝ŠW(w©Żng)Ė±×ķ░ļRA���Ż¼╚½RA║═ś╦(bi©Īo)£╩(zh©│n)▒╚└²²X╬ü▌åĄ─ąąäė(d©░ng)“ī(q©▒)äė(d©░ng)Ų„
ĪĪĪĪ
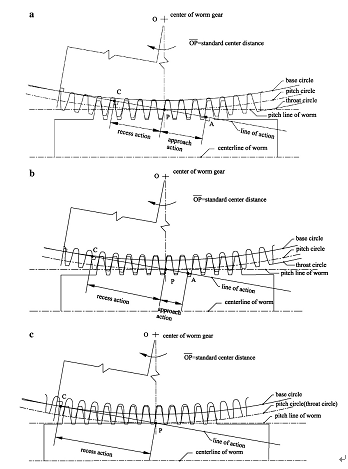
łD 1’@╩Š┴╦╚²ĘNŅÉ(l©©i)ą═Ą─╬ü▌å╬üŚUé„äė(d©░ng)ć¦║ŽŻ¼░ļRA�Ż¼╚½RA║═ś╦(bi©Īo)£╩(zh©│n)▒╚└²²X╬ü▌åé„äė(d©░ng)Ż¼Ä¦ļp╔Ņ╚ļč└²XŽÓ═¼Ą─ś╦(bi©Īo)£╩(zh©│n)ųąą─ŠÓ�ĪŻłD1Ż©aŻ®╩Š│÷┴╦╬ü▌åé„äė(d©░ng)Ħś╦(bi©Īo)£╩(zh©│n)▒╚└²²XŠW(w©Żng)Ė±╗»ŽĄĮy(t©»ng)
ĪĪĪĪ
ĪĪĪĪ
łD1 ²X▌åĄ─ĘĮ╩Įąąäė(d©░ng)--░╝▀\(y©┤n)äė(d©░ng)Ż©aŻ®ś╦(bi©Īo)£╩(zh©│n)Ą─▒╚└²č└Ż©bŻ®░ļRA╝░Ż©cŻ®╚½RA╬ü▌åé„äė(d©░ng)įŁ└Ē
ĪĪĪĪ
ĪĪĪĪ
ė╔ė┌Įėė|Å─A³c(di©Żn)Ż©Ų³c(di©Żn)²Xć¦║ŽŻ®░l(f©Ī)š╣ĄĮP³c(di©Żn)Ż©╣Ø(ji©”)³c(di©Żn)Ż®Ż¼ėąę╗éĆ(g©©) ĘĮĘ©ąąäė(d©░ng)��Ż¼Č°░╝Ž▌Ą─äė(d©░ng)ū„░l(f©Ī)╔·į┌P³c(di©Żn)ĄĮC³c(di©Żn)Ż©²Xć¦║ŽĄ─ĮK³c(di©Żn)Ż®ĪŻųĄĄ├ūóęŌĄ─╩Ū���Ż¼ā╔éĆ(g©©)▓┐Ęų ąąäė(d©░ng)Ą─ĘĮ╩Įąąäė(d©░ng)�Ż¼ąąäė(d©░ng)░╝ŠĆ╩ŪŽÓĄ╚Ą─žĢ½I(xi©żn)�ĪŻį┌²X▌åć¦║ŽŲ┌ķgŻ¼įōĘĮĘ©▓┘ū„╩Ū ╗¼äė(d©░ng)▀^(gu©░)│╠ųą��Ż¼▓óŪęą╬│╔▒╚░╝▓┐äė(d©░ng)ū„Ą──”▓┴Ą─ų„ę¬┘Yį┤�����ĪŻ╦³╩Ūę╗ĘNėą║”Ą─╣╬äė(d©░ng)��Ż¼▀@ ═∙═∙┤®┴╦²X▌åĄ─▒Ē├µ����ĪŻ─”▓┴╩ŪĖ▀Ą─Ż¼╦³Ģ■(hu©¼)ī¦(d©Żo)ų┬äØé¹║═įļ┬Ģ�ĪŻ╚╗Č°Ż¼įō░╝▓┐Ą─äė(d©░ng)ū„ć¦║Ž▀^(gu©░)│╠ųą�����Ż¼ęįÄ═ų·▒Ż│ųĄ─╬ü▌åé„äė(d©░ng)Ą─ą²▐D(zhu©Żn)į┌Ė„ūįĄ─ĘĮŽ“Ż¼▓óŪę─”▓┴▌^Ż©╬┤═Ļ�Ż¼Ž┬ę╗Ēō(y©©)Ż®
ĪĪĪĪĖĮ╝■Ž┬▌dŻ║░╝ąąäė(d©░ng)╬ü▌å┼cöĄ(sh©┤)īW(xu©”)─Żą═║═²X├µļp²X╔Ņ╚½╬─Ž┬▌d
|