|
╗∙ė┌51å╬Ų¼ÖCĄ─ČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ
ĮŁ╠K┐Ų╝╝┤¾īW(xu©”)ļŖūėą┼ŽóīW(xu©”)į║ Ž─╦╣ŠS1 ĻÉčĖ2ĪĪ2018/7/30 9:58:59
Ż©Įė╔ŽĒōŻ®×ķ╣żśI(y©©)ÖCŲ„╚╦Ą─║╦ą─Ż¼┐žųŲŽĄĮy(t©»ng)│õ«ö(d©Īng)ų°╚ń═¼╚╦Ą─┤¾─Xę╗░ŃĄ─ĮŪ╔½���Ż¼┐žųŲŽĄĮy(t©»ng)┐╔ęįĮė╩▄═ŌĮńé„ĖąŲ„░l(f©Ī)╦═▀^üĒĄ─ą┼╠¢▓óī”Ųõ▀Mąą╠Ä└Ē�����Ż¼╚╗║¾Ė∙ō■(j©┤)ŅA(y©┤)┤µą┼Žó║═«ö(d©Īng)ĢrÖCŲ„╚╦╦∙╠ÄĄ─Łh(hu©ón)Š│▀Mąą┼ąöÓ║═øQ▓▀����Ż¼Å─Č°╩╣ÖCŲ„╚╦─▄ē“Ė³╝ė┐╔┐┐�ĪóŠ½┤_Īó┐ņ╦┘ėąą¦Ą─═Ļ│╔╚╬äš(w©┤)���Ż¼Č°Š═─┐Ū░┐žųŲŽĄĮy(t©»ng)Ą─░l(f©Ī)š╣Ūķør┐┤üĒ�����Ż¼╚į╚╗┤µį┌═©ė├ąį▓╗ē“Ė▀���Īóķ_Ę┼ąį▓╗ē“Ė▀║═┐╔öUš╣ąį▓╗ē“ÅŖĄ╚╚▒³cŻ¼╦∙ęį蹊┐│÷ę╗╠ūĖ▀ą¦īŹė├Ą─╣żśI(y©©)ÖCŲ„╚╦┐žųŲŽĄĮy(t©»ng)╩Ū─┐Ū░ÖCŲ„╚╦ąąśI(y©©)├µ┼RĄ─▒╚▌^╝▒Ų╚Ą─å¢Ņ}��ĪŻ
ĪĪĪĪ
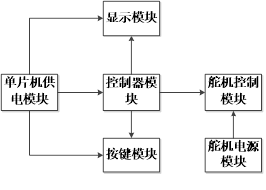
▒Š╬─蹊┐ā╚(n©©i)╚▌ų„ę¬╩Ū═©▀^å╬Ų¼ÖCĄ─īW(xu©”)┴Ģ(x©¬)Ż¼įO(sh©©)ėŗ╗∙ė┌å╬Ų¼ÖCĄ─ČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦┐žųŲŽĄĮy(t©»ng)Ą─š¹¾wĘĮ░Ė���ĪŻų„ꬥ─įO(sh©©)ėŗ╚╬äš(w©┤)�����Ż¼╩Ūīó6éĆ180Č╚ȵÖC┼cŽÓæ¬(y©®ng)ÖCąĄ═ŌÜżĮMčb│╔ČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦Ą─ÖCąĄ═Ōą╬ĮY(ji©”)śŗ(g©░u)�Ż¼▀xō±į÷ÅŖą═51å╬Ų¼ÖCū„×ķ┐žųŲŽĄĮy(t©»ng)Ą─┐žųŲŲ„üĒ┐žųŲIO┐┌▌ö│÷└ĒŽļĄ─PWMą┼╠¢Å─Č°┐žųŲČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦Ė„éĆūįė╔Č╚Ą─ȵÖCäėū„���Ż¼ūŅĮK─▄ē“┐žųŲČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦▒╚▌^└ĒŽļĄ─═Ļ│╔ųĖČ©Ą─äėū„ū╦æB(t©żi)���ĪŻ
ĪĪĪĪ
2┐žųŲŽĄĮy(t©»ng)ĘĮ░ĖįO(sh©©)ėŗ
ĪĪĪĪ
2.1ČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦▀\äė└Ēšō╗∙ĄA(ch©│)
ĪĪĪĪ
▀@ę╗▓┐Ęųų„ę¬ĮķĮBÖCŲ„╚╦Ą─▀\äė└Ēšōų¬ūRŻ¼ÖCŲ„╚╦▀\äėĘų╬÷│Żė├ā╔ĘNĘĮĘ©Ż║ę╗ĘN╩Ūš²▀\äėīW(xu©”)Ęų╬÷���Ż¼┴Ēę╗ĘNät╩Ū─µ▀\äėīW(xu©”)Ęų╬÷�Ż¼Š▀¾wĻP(gu©Īn)ŽĄ╚ńłD2-1╦∙╩Š����ĪŻš²Ž“Ęų╬÷╩ŪļSęŌš{(di©żo)╣Ø(ji©”)Ė„éĆĻP(gu©Īn)╣Ø(ji©”)Ą─ĮŪČ╚Å─Č°▀_ĄĮ╚╬ęŌū╦æB(t©żi)Ż╗─µŽ“Ęų╬÷ät╩Ū╩ūŽ╚┤_Č©╦∙ąĶū╦æB(t©żi)�����Ż¼Č°║¾ėŗ╦Ń│÷Ė„éĆĻP(gu©Īn)╣Ø(ji©”)╦∙ąĶš{(di©żo)š¹Ą─ĮŪČ╚ĪŻ
ĪĪĪĪ

ĪĪĪĪ
łD2-1ÖCŲ„╚╦š²─µ▀\äėĻP(gu©Īn)ŽĄłD
ĪĪĪĪ
į┌┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗųą▀xė├Ą─╩ŪļpūŃÖCŲ„╚╦��Ż¼į┌äėū„Ą─▀^│╠ųąų„ę¬╩Ū═©▀^ŅÉ╦Ųė┌╚╦ŅÉąąū▀ĘĮ╩Įę╗śė��Ż¼ęŲäėųžą─üĒ▒ŻūCŲĮ║Ō�ĪŻļpūŃÖCŲ„╚╦║═╚╦ŅÉ╦ŲōĒėą¾yĻP(gu©Īn)╣Ø(ji©”)����ĪóŽźĻP(gu©Īn)╣Ø(ji©”)║═§ūĻP(gu©Īn)╣Ø(ji©”)Ż¼├┐Śl═╚ė├╚²éĆą²▐D(zhu©Żn)ĮŪČ╚ĘČć·×ķ180Č╚Ą─ȵÖC┤·╠µū„×ķĻP(gu©Īn)╣Ø(ji©”)�ĪŻÖCŲ„╚╦Ą─ę╗éĆĻP(gu©Īn)╣Ø(ji©”)ŽÓ«ö(d©Īng)ė┌ā╔éĆūįė╔Č╚Ż¼╗“╩Ūū¾ėęūįė╔Č╚��Īó╗“╩Ū╔ŽŽ┬ūįė╔Č╚ęų╗“╩ŪŪ░║¾ūįė╔Č╚�ĪŻ
ĪĪĪĪ
═©▀^Ū░├µĄ─š²─µ▀\äėīW(xu©”)Ą─└ĒšōĘų╬÷┐╔ęį┴╦ĮŌŻ¼¾yĻP(gu©Īn)╣Ø(ji©”)�ĪóŽźĻP(gu©Īn)╣Ø(ji©”)Īó§ūĻP(gu©Īn)╣Ø(ji©”)Ą─Ė®č÷ūįė╔Č╚╣▓═¼ģf(xi©”)š{(di©żo)┐╔ęį═Ļ│╔ų▒ŠĆąąū▀╣”─▄���Ż╗¾yĻP(gu©Īn)╣Ø(ji©”)║═§ūĻP(gu©Īn)╣Ø(ji©”)Ą─Ų½▐D(zhu©Żn)ūįė╔Č╚ģf(xi©”)š{(di©żo)äėū„┐╔ęįīŹ¼F(xi©żn)ŲĮ├µā╚(n©©i)Ą─ųžą─é╚(c©©)Ž“Ų½ęŲ╣”─▄��Ż╗§ūĻP(gu©Īn)╣Ø(ji©”)äėū„┐╔ęįīŹ¼F(xi©żn)ū¾ėęĘĮŽ“Ą─Ų½▐D(zhu©Żn)��ĪŻ
ĪĪĪĪ
2.2ŽĄĮy(t©»ng)ė▓╝■įO(sh©©)ėŗ
ĪĪĪĪ
┤╦įO(sh©©)ėŗų„ę¬╩ŪįO(sh©©)ėŗę╗┐Ņęį51å╬Ų¼ÖCū„×ķų„ę¬┐žųŲŲ„Ą─┐žųŲŽĄĮy(t©»ng)����Ż¼═©▀^▄ø╝■ŠÄ│╠Ė─ūāĖ„┐žųŲĮė┐┌Ą─├}ø_īÆČ╚Ż¼ęį┤╦üĒš{(di©żo)╣Ø(ji©”)Ė„ĻP(gu©Īn)╣Ø(ji©”)ȵÖCĄ─ą²▐D(zhu©Żn)ĮŪČ╚���Ż¼Å─Č°╩╣ļpūŃÖCŲ„╚╦═Ļ│╔ųĖČ©Ą─äėū„ū╦æB(t©żi)��ĪŻ
ĪĪĪĪ
┐žųŲŽĄĮy(t©»ng)Ą─įO(sh©©)ėŗ�����Ż¼ų„ę¬Ęų×ķ╬ÕéĆ─ŻēK��Ż¼ėą┐žųŲŲ„─ŻēK��ĪóȵÖC┐žųŲ─ŻēK��Īó’@╩Š─ŻēK�ĪóļŖį┤─ŻēKęį╝░░┤µI─ŻēK��Ī��Ż┐žųŲŲ„─ŻēK��Ż¼ę“×ķī”ė┌ȵÖCĄ─┐žųŲųvŠ┐ę╗Č©Ą─ėąą¦ąį║═┐ņ╦┘ąįŻ¼Ųš═©Ą─51å╬Ų¼ÖC¤oĘ©ØMūŃȵÖCę¬Ū¾Ą─╠Ä└Ē╦┘Č╚�Ż¼Įø(j©®ng)▀^▒╚▌^▀xō±STCŽĄ┴ąĄ─į÷ÅŖą═51å╬Ų¼ÖCĪŻ╦³Ą─╠Ä└Ē╦┘Č╚╩ŪŲš═©Ą─51å╬Ų¼ÖCĄ─╠Ä└Ē╦┘Č╚Ą─8-12▒Č�Ż¼─▄ē“║▄║├ĄžØMūŃȵÖCī”ė┌╠Ä└Ē╦┘Č╚Ą─ę¬Ū¾Ż╗ȵÖC┐žųŲ─ŻēK�Ż¼ę“×ķȵÖCĄ─Ēææ¬(y©®ng)Ģrķgī”ė┌ļpūŃĄ─ÖCŲ„╚╦┐žųŲĘŪ│Żųžę¬Ż¼┐╔ęį═©▀^īóȵÖC╣żū„ļŖē║╠ßĖ▀ĄĮ6v╗“š▀═©▀^Ė─ūāȵÖCĄ─░▓čb╬╗ų├ęį╝ėķL┴”▒█Ą─ĘĮĘ©üĒīŹ¼F(xi©żn)ȵÖCĄ─┐ņ╦┘Ēææ¬(y©®ng)[6]���ĪŻČµÖCĄ─ą²▐D(zhu©Żn)ĮŪČ╚┼cPWMĄ─├}īÆĮoČ©ųĄ│╔š²▒╚ĻP(gu©Īn)ŽĄ��Ż¼ōQčįų«Ż¼ī”ȵÖCĮŪČ╚┐žųŲŠ═╩Ū═©▀^Ė─ūāĘĮ▓©ą┼╠¢Ą─š╝┐š▒╚īŹ¼F(xi©żn)�����Ż¼▀xė├Ą─╩ŪMG996rĄ─ȵÖC�Ż╗ļŖį┤─ŻēKŻ¼ø]ėą╦³š¹éĆ┐žųŲŽĄĮy(t©»ng)╩Ū¤oĘ©╣żū„Ą─��Ż¼Č°▓╗═¼Ą──ŻēKąĶꬥ─ļŖį┤ļŖē║╩Ū▓╗═¼Ą─���Ż¼╦∙ęį▀xō±īóå╬Ų¼ÖCĄ─╣®ļŖļŖį┤┼cȵÖCĄ─╣®ļŖļŖį┤ģ^(q©▒)Ęųķ_üĒ��ĪŻ
ĪĪĪĪ
ī”ŽĄĮy(t©»ng)Ą─ė▓╝■Ą─┐é¾wįO(sh©©)ėŗ��Ż¼▓╔ė├Ą─╩Ū┐éĘųĄ─ĮY(ji©”)śŗ(g©░u)��ĪŻŽ╚╩ŪĖ∙ō■(j©┤)╣”─▄ę¬Ū¾▀Mąą┐é¾wįO(sh©©)ėŗ���Ż¼į┘╝Ü╗»ĄĮĖ„éĆ─ŻēK蹊┐║═įO(sh©©)ėŗ�����Ż¼Š▀¾w╚ńłD2-2╦∙╩Š�ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD2-2┐žųŲŽĄĮy(t©»ng)Ą─ė▓╝■─ŻēKĮM│╔łD
ĪĪĪĪ
2.3ŽĄĮy(t©»ng)▄ø╝■įO(sh©©)ėŗ
ĪĪĪĪ
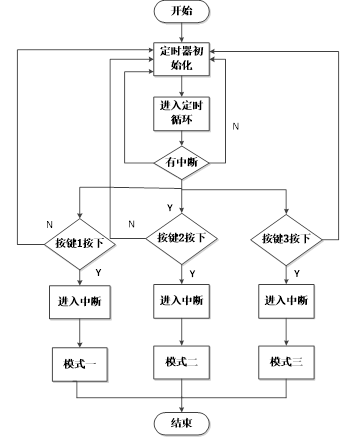
╣żśI(y©©)ÖCŲ„╚╦┐žųŲŽĄĮy(t©»ng)▄ø╝■╣”─▄įO(sh©©)ėŗ┴„│╠łD╚ńłD2-3╦∙╩Š���ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD2-3 ŽĄĮy(t©»ng)│╠ą“┴„│╠łD
ĪĪĪĪ
┐žųŲŽĄĮy(t©»ng)Ą─▄ø╝■▓┐Ęųų„ę¬īŹ¼F(xi©żn)Ą─╣”─▄╚ńŽ┬Ż║═©▀^░┤µI▀Mąą─Ż╩ĮĄ─▀xō±����Ż¼Ęųäeėą╚²ĘN─Ż╩ĮŻ║╠ż▓Į���Īó§┌─_��ĪóÅØč³��Ż¼▓óŪę├┐ę╗ĘN─Ż╩ĮČ╝═©▀^▓╗═¼Ņü╔½Ą─┴„╦«¤¶▀Mąą’@╩Š ���ĪŻ
ĪĪĪĪ
ŽĄĮy(t©»ng)Ą─┐é¾wįO(sh©©)ėŗ╩Ū▓╔ė├Ęų┐éĄ─ĮY(ji©”)śŗ(g©░u)▀MąąįO(sh©©)ėŗŻ¼Ž╚╩ŪįO(sh©©)ėŗ├┐ę╗éĆūė─ŻēK▓ó▀Mąąūė─ŻēKĄ─│╠ą“ŠÄīæŻ¼ūŅ║¾į┌ų„│╠ą“ųąų▒Įėš{(di©żo)ė├ūė║»öĄ(sh©┤)Š═┐╔ęį┴╦��ĪŻ╠ż▓Į�����Īó§┌─_║═ÅØč³Ą╚ū╦æB(t©żi)¾w¼F(xi©żn)╔ŽŽ┬��Īóū¾ėęĄ╚ČÓéĆūįė╔Č╚š²īŹ¼F(xi©żn)┴╦ī”ČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦Ą─┐žųŲę¬Ū¾�ĪŻ
ĪĪĪĪ
Ė∙ō■(j©┤)╔Ž├µš┬╣Ø(ji©”)Ą─šf├„Ż¼▄ø╝■▓┐ĘųąĶę¬įO(sh©©)ų├╚²éĆūė─ŻēK│╠ą“Ż║Č©ĢrŲ„ųąöÓ│╠ą“�Īóę╗éĆȵÖC┐žųŲ│╠ą“║═╣żśI(y©©)ÖCŲ„╚╦ū╦æB(t©żi)┐žųŲ│╠ą“ĪŻ
ĪĪĪĪ
2.3.1Č©ĢrŲ„─ŻēKįO(sh©©)ėŗ
ĪĪĪĪ
«ö(d©Īng)ŽĄĮy(t©»ng)ųąąĶę¬ī”ȵÖCĄ─īŹ¼F(xi©żn)┐žųŲĢr�Ż¼▓╔ė├Ą─┐žųŲĘĮ╩Į╩Ū═©▀^Ė─ūāå╬Ų¼ÖCĄ─ę╗éĆČ©ĢrŲ„ųąöÓĄ─│§ųĄüĒĖ─ūā├}ø_īÆČ╚Ż¼Å─Č°Ż©╬┤═Ļ���Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|