|
╗∙ė┌51å╬Ų¼ÖCĄ─ČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ
ĮŁ╠K┐Ų╝╝┤¾īWļŖūėą┼ŽóīWį║ Ž─╦╣ŠS1 ĻÉčĖ2ĪĪ2018/7/30 9:58:59
Ż©Įė╔ŽĒōŻ®Ė─ūāȵÖCĄ─ą²▐D(zhu©Żn)ĮŪČ╚�����ĪŻ▀xō±╩╣ė├Ą─ȵÖCMG996R╣żū„├}ø_īÆČ╚ĘČć·╩Ū0.5ms-2.5ms�����Ż¼ī”æ¬(y©®ng)ȵÖCĄ─-90Č╚ĄĮ+90Č╚����Ż¼▀@└’Ą─│╠ą“įO(sh©©)ėŗ╩Ūį┌ųąöÓųąų„ę¬ßśī”▀@2msĄ─╣żū„├}ø_īÆČ╚ĘČć·▀Mąą╠Ä└ĒŻ¼▀@śėų╗ę¬╩╣ė├ę╗éĆČ©ĢrŲ„Š═ūŃē“┐žųŲȵÖCĄ─äėū„┴╦��Ż¼╝╚╣Ø(ji©”)╩Ī┴╦ė▓╝■ļŖ┬Ęę▓£p╔┘┴╦▄ø╝■ķ_õN����Ż¼╩╣Ą├╣żśI(y©©)ÖCŲ„╚╦┐žųŲŽĄĮy(t©»ng)╣żū„ą¦┬╩║═┐žųŲŠ½Č╚Č╝ėą╦∙╠ßĖ▀ĪŻ
ĪĪĪĪ
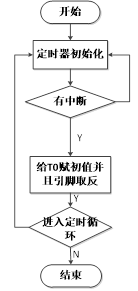
Š▀¾wĄ─įO(sh©©)ėŗ▀^│╠Ż║└²╚ńŽļūīȵÖC▐D(zhu©Żn)Ž“30Č╚���Ż¼╦³Ą─š²├}ø_čėĢr×ķ0.8ms�Ż¼ätžō├}ø_čėĢr×ķ20ms-0.8ms=19.2ms�����Ż¼╦∙ęįķ_╩╝ĢrŠ═┤“ķ_ųąöÓŻ¼Įo┐žųŲ┐┌░l(f©Ī)╦═Ė▀ļŖŲĮ��Ż¼įO(sh©©)ų├Č©ĢrŲ„čėĢr0.8ms║¾īó┐žųŲ┐┌ļŖŲĮ╚ĪĘ┤▓óīóČ©ĢrŲ„öĄ(sh©┤)ųĄĖ─×ķ1.7ms��Ż¼į┘Įø(j©®ng)▀^15msĄ─Ą═ļŖŲĮČ©Ģr裣h(hu©ón)�����Ż¼ätȵÖCą²▐D(zhu©Żn)ĄĮī”æ¬(y©®ng)ĮŪČ╚║¾═Żų╣▐D(zhu©Żn)äė�����ĪŻŠ▀¾w│╠ą“┴„│╠łD╚ńłD2-4╦∙╩Š�����ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD2-4Č©ĢrŲ„│╠ą“┴„│╠łD
ĪĪĪĪ
2.3.2ę╗éĆȵÖC┐žųŲ─ŻēKįO(sh©©)ėŗ
ĪĪĪĪ
į┌▀@éĆ┐žųŲŽĄĮy(t©»ng)ųą��Ż¼ė╔ė┌ę¬ī”ČÓ┬ĘȵÖC▀Mąą┐žųŲ���Ż¼╦∙ęįį┌ŠÄīæČÓéĆȵÖC┐žųŲ│╠ą“ų«Ū░Ż¼Ž╚ī”ę╗éĆȵÖC▀MąąŠÄ│╠┐žųŲ���ĪŻŠ▀¾w│╠ą“┴„│╠łD╚ńłD2-5╦∙╩Š��ĪŻ
ĪĪĪĪ

ĪĪĪĪ
łD2-5ę╗éĆȵÖC┐žųŲ│╠ą“┴„│╠łD
ĪĪĪĪ
ĮoȵÖCę╗éĆ0.5ms├}ø_ą┼╠¢�����Ż¼ČµÖC▐D(zhu©Żn)ĄĮ0Č╚╬╗ų├����Ż¼į┘ųžą┬Įoę╗éĆ1.5msĄ─├}ø_ą┼╠¢Ż¼ČµÖC╬╗ų├▐D(zhu©Żn)ĄĮ90Č╚╬╗ų├�Ż¼│╠ą“ų„ę¬īŹ¼F(xi©żn)ę╗éĆȵÖCį┌0Č╚║═90Č╚ų«ķgüĒ╗žäėū„Ż¼Š▀¾wą¦╣¹╚ńłD2-6(a) ║═(b)╦∙╩Š���ĪŻ
ĪĪĪĪ

ĪĪĪĪ
(a) ȵÖC0Č╚ą¦╣¹łD
ĪĪĪĪ

ĪĪĪĪ
(b) ȵÖC90Č╚ą¦╣¹łD
ĪĪĪĪ
łD2-6ę╗éĆȵÖC┐žųŲą¦╣¹łD
ĪĪĪĪ
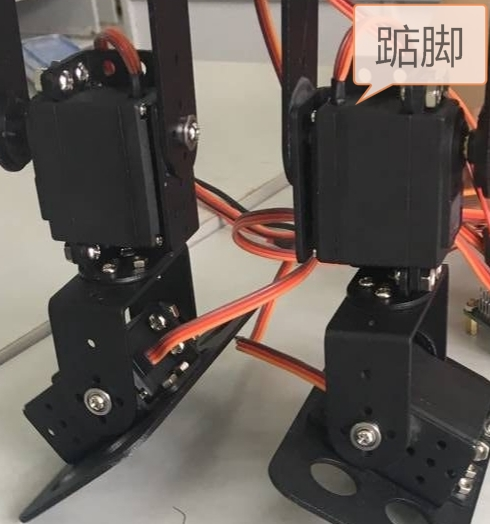
2.3.3ÖCŲ„╚╦ū╦æB(t©żi)┐žųŲ─ŻēKįO(sh©©)ėŗ
ĪĪĪĪ
╗∙ė┌╔ŽąĪ╣Ø(ji©”)ī”ė┌ę╗éĆȵÖCĄ─▄ø╝■┐žųŲ���Ż¼═©▀^Ū░├µĄ─š²▀\äėīW└ĒšōĘų╬÷┐╔ęį┐žųŲČÓéĆȵÖC═¼Ģräėū„Ż¼įO(sh©©)ėŗ┴╦§┌─_���ĪóÅØč³║═╠ż▓ĮĄ╚╗∙▒ŠĄ─äėū„ū╦æB(t©żi)üĒ¾w¼F(xi©żn)ī”ė┌╣żśI(y©©)ÖCŲ„╚╦Ą─ČÓūįė╔Č╚Ą─┐žųŲ����ĪŻę“×ķę╗éĆū╦æB(t©żi)ąĶę¬ĘųĮŌ│╔║▄ČÓéĆąĪĄ─äėū„ū╦æB(t©żi)���Ż¼╣Ō═©▀^ćLįć╩Ūø]ėą▐kĘ©Ą├│÷öĄ(sh©┤)ō■(j©┤)Ą─���Ż¼╦∙ęį▓╔╚Ī╔Ž╬╗ÖCüĒ£yįć│÷▀@ą®╗∙ĄA(ch©│)äėū„ū╦æB(t©żi)Ą─├┐éĆȵÖCĄ─╣żū„├}īÆöĄ(sh©┤)ĮM�Ż¼į┘īóöĄ(sh©┤)ō■(j©┤)ŠÄīæ▀M│╠ą“���Ż¼Å─Č°īŹ¼F(xi©żn)ī”ČÓūįė╔Č╚╣żśI(y©©)ÖCŲ„╚╦Ą─└ĒŽļ┐žųŲ��ĪŻ
ĪĪĪĪ
ė╔ė┌▀xė├Ą─ȵÖC╩Ū─ŻöMȵÖCMG996RŻ¼╦³Ą─ȵÖCą²▐D(zhu©Żn)╦┘Č╚╩Ū╣╠Č©Ą─����Ż¼Ą½╩Ū▀@śė«öąĶę¬äėū„ĮŪČ╚▌^┤¾Ą─Ģr║“Ż¼Š═ĘŪ│Ż╚▌ęūī¦(d©Żo)ų┬ÖCŲ„╚╦╩¦╚źųžą─ī¦(d©Żo)ų┬äėū„╩¦öĪ��ĪŻĮø(j©®ng)▀^ČÓ┤╬ćLįć��Ż¼øQČ©├┐┤╬ūīȵÖCą²▐D(zhu©Żn)3Č╚ĄĮ4Č╚ū¾ėę��Ż¼├┐┤╬╝ė╔Ž100msĄ─čėĢr��Ż¼▀@śė═©▀^▄ø╝■čėĢrĄ─ĘĮĘ©üĒĮĄĄ═ȵÖCĄ─▐D(zhu©Żn)äė╦┘Č╚���Ż¼Å─Č°▒ŻūCÖCŲ„╚╦─▄ē“ŲĮĘĆ(w©¦n)Ą─äėū„���ĪŻ
ĪĪĪĪ
└²╚ń����Ż¼═©▀^▄ø╝■ŠÄ│╠�����Ż¼╣żśI(y©©)ÖCŲ„╚╦ū÷│÷§┌─_äėū„����Ż¼▀@éĆäėū„ū╦æB(t©żi)öĄ(sh©┤)ō■(j©┤)ęį╝░ī”æ¬(y©®ng)Ą─ĮŪČ╚╚ńŽ┬╦∙╩ŠĪŻ
ĪĪĪĪ
{1500,930,1500,1053,1916,2160}Ī¹Ī·{90o 55.8o 90o 63.2o 115o 129.6o}
ĪĪĪĪ
{1484,930,1516,992,2254,1762}Ī¹Ī·{89o 55.8o 91o 59.5o 135.2o 105.7o}
ĪĪĪĪ
▒Šš┬ų„ę¬╩ŪĖ∙ō■(j©┤)┐žųŲŽĄĮy(t©»ng)╣”─▄ę¬Ū¾ī”ŽĄĮy(t©»ng)▀MąąĄ─▄ø╝■įO(sh©©)ėŗ���Ż¼ų„ę¬╩Ūī”Č©ĢrŲ„║═ę╗éĆȵÖC┐žųŲŽ╚▀MąąīŹ“ך{(di©żo)įć��Ż¼╚╗║¾į┘ī”ČÓ┬ĘȵÖCīŹ¼F(xi©żn)Žļꬥ─ū╦æB(t©żi)┐žųŲ����ĪŻ
ĪĪĪĪ
3 īŹ“×ĮY(ji©”)╣¹
ĪĪĪĪ
Ż©1Ż®§┌─_ū╦æB(t©żi)£yįć
ĪĪĪĪ
╣żśI(y©©)ÖCŲ„╚╦ū÷│÷§┌─_äėū„�Ż¼ī”æ¬(y©®ng)öĄ(sh©┤)ō■(j©┤)╚ńŽ┬╦∙╩ŠŻ¼ą¦╣¹łD╚ńłD3-1╦∙╩Š�����ĪŻ
ĪĪĪĪ
{1500,930,1500,1053,1916,2160}Ī¹Ī·{90o 55.8o 90o 63.2o 115o 129.6o}
ĪĪĪĪ
{1484,930,1516,992,2254,1762}Ī¹Ī·{89o 55.8o 91o 59.5o 135.2o 105.7o}
ĪĪĪĪ
ĪĪĪĪ
łD3-1§┌─_ą¦╣¹łD
ĪĪĪĪ
Ż©2Ż®Ū░āAū╦æB(t©żi)£yįć
ĪĪĪĪ
╣żśI(y©©)ÖCŲ„╚╦ū÷│÷Ū░āAäėū„Ż¼öĄ(sh©┤)ō■(j©┤)╚ńŽ┬╦∙╩Š�����ĪŻą¦╣¹łD╚ńłD3-2╦∙╩Š�����ĪŻ
ĪĪĪĪ
{1500,930,1500,1116,1884,2162}Ī¹Ī·{90o 55.8o 90o 66.9o 113o 129.7o}
ĪĪĪĪ
{1823,653,1947,561,1884,2162}Ī¹Ī·{109.4o 39Ż©╬┤═Ļ���Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|