|
ÖC(j©®)ąĄįO(sh©©)ėŗ(j©¼)äō(chu©żng)ą┬┤¾┘ÉįO(sh©©)ėŗ(j©¼)šf(shu©Ł)├„Ģ°(sh©▒)Ż║ĄžšÅUąµ╦čŠ╚čbų├Ą─蹊┐
┘Yį┤╠ņŽ┬ĪĪ2019/2/9 9:55:29
ĪĪĪĪ ę╗Ż«ę²čį
ĪĪĪĪ
Ąžš��ĪóĄVļy�����Īó╗×─(z©Īi)�����Īó║ķ╦«Ą╚×─(z©Īi)║”╩┬╝■Įø(j©®ng)│Żį┌ł¾(b©żo)┐»├Į¾wųął¾(b©żo)Ą└���Ż¼╠žäe╩Ū╚ń2008─Ļ512Ńļ┤©Ąžš║═Į±─Ļ╦─┤©ė±śõ(sh©┤)Ą─ĄžšĖ³╩ŪĮo─│éĆ(g©©)ģ^(q©▒)ė“╚╦├±Ą─╔·├³žö(c©ói)«a(ch©Żn)įņ│╔┴╦ųž┤¾Ą─ōp╩¦����Ż¼Ā┐äė(d©░ng)ų°ā|╚f(w©żn)╚╦├±Ą─ą─����ĪŻūį╚╗×─(z©Īi)║”▒M╣▄┐╔ęį▓╔╚Īę╗ą®ŅA(y©┤)Ę└┤ļ╩®Ż¼└²╚ń╠ßĖ▀Į©ų■╬’Ą─┐╣šĄ╚╝ē(j©¬)��Ż¼╝ėÅŖ(qi©óng)╗∙ĄA(ch©│)įO(sh©©)╩®Ą─Į©įO(sh©©)���Ż¼ī”(du©¼)╚½├±▀M(j©¼n)ąą×─(z©Īi)║”ŅA(y©┤)Ę└┼cæ¬(y©®ng)ī”(du©¼)Ą─░▓╚½Į╠ė²Ą╚���Ż¼ę▓┐╔─▄▓╔╚Īę╗ą®ĘĮĘ©▀M(j©¼n)ąąŅA(y©┤)£y(c©©)���Ż¼Ą½┐éĄ─üĒ(l©ói)šf(shu©Ł)Ż¼ūį╚╗×─(z©Īi)║”═∙═∙╩Ū¤o(w©▓)Ę©£╩(zh©│n)┤_ŅA(y©┤)£y(c©©)Ą─����Ż¼ę▓╩Ū¤o(w©▓)Ę©▒▄├ŌĄ─Ż¼Č°Ūęę╗Ą®░l(f©Ī)╔·┴╦Š═Ģ■(hu©¼)Įo╚╦├±Ą─╔·«a(ch©Żn)╔·╗Ņįņ│╔║▄┤¾Ą─ōp╩¦����ĪŻ╚ń║╬─▄į┌┤¾Ą─×─(z©Īi)║”░l(f©Ī)╔·║¾š╣ķ_(k©Īi)Š╚į«Ż¼īó×─(z©Īi)║”įņ│╔Ą─ōp╩¦ĮĄĄ═ĄĮūŅĄ═│╠Č╚���Ż¼īó╩Ūę╗╝■ĘŪ│ŻėąęŌ┴xĄ─╩┬Ūķ�����ĪŻę▓įSę▓š²╩Ūę“?y©żn)ķ▀@éĆ(g©©)įŁę“���Ż¼2010─ĻĄ┌╦─ī├┤¾īW(xu©”)╔·ÖC(j©®)ąĄįO(sh©©)ėŗ(j©¼)äō(chu©żng)ą┬┤¾┘ÉĄ─ų„Ņ}▒╗Č©┴x×ķŻ║Ī░šõÉ█(©żi)╔·├³Ż¼ĘŅ½I(xi©żn)╔ńĢ■(hu©¼)Ī▒ĪŻā╚(n©©i)╚▌×ķĪ░į┌═╗░l(f©Ī)×─(z©Īi)ļyųą���Ż¼ė├ė┌Š╚į«ĪóŲŲšŽ�����Īó╠ė╔·���Īó▒▄ļyĄ─ÖC(j©®)ąĄ«a(ch©Żn)ŲĘĄ─įO(sh©©)ėŗ(j©¼)┼cųŲū„Ī▒��ĪŻæ¬(y©®ng)įōšf(shu©Ł)╩ŪĘŪ│Ż▀mĢr(sh©¬)Ą─�����ĪŻ
ĪĪĪĪ
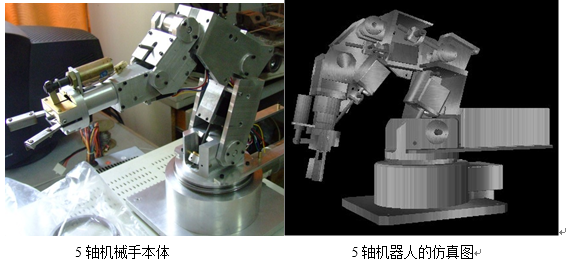
Č■Ż«┐é¾wįO(sh©©)ėŗ(j©¼)
ĪĪĪĪ
╬ęéāĄ─ģó┘Éū„ŲĘę▓ŽļŠo┐█▀@ę╗ų„Ņ}Č°š╣ķ_(k©Īi)����ĪŻģó┘Éū„ŲĘĄ─Ņ}─┐Ģ║Č©×ķŻ║ĄžšÅUąµ╦čŠ╚čbų├Ą─蹊┐�����ĪŻų«╦∙ęįČ©▀@śėĄ─Ņ}─┐���Ż¼╩Ūė╔ė┌Ąžš═∙═∙ī”(du©¼)ę╗éĆ(g©©)ģ^(q©▒)ė“įņ│╔║▄?ch©ź)?y©ón)ųžĄ─ŲŲē─�Ż¼Č°ī”(du©¼)ąę┤µš▀Ą─╦čŠ╚╩Ūʱ╝░Ģr(sh©¬)Ż¼īóų▒Įėė░ĒæĄĮ╔·▀Ćš▀Ą─öĄ(sh©┤)┴┐����Ż¼║═鹚▀īóüĒ(l©ói)įņ│╔ōp║”Ą─┤¾ąĪęį╝░īóüĒ(l©ói)╗ųÅ═(f©┤)Ą─ŪķørĪŻÅ─įŁ└Ē╔Žšf(shu©Ł)�����Ż¼įōū„ŲĘę▓─▄ē“ė├ė┌Ųõ╦³ŅÉ(l©©i)ą═×─(z©Īi)ļyĄ─Š╚ų·�����ĪŻ
ĪĪĪĪ
2Ż«1 ╗∙▒ŠįO(sh©©)ėŗ(j©¼)Ė┼─Ņ
ĪĪĪĪ
įO(sh©©)ėŗ(j©¼)▀@╠ūÅUąµ╦čŠ╚čbų├Ą──┐Ą─╩Ū╬ęéāŽŻ═¹ĮoŠ╚į«╚╦åTį┌š²╩Įš╣ķ_(k©Īi)Š╚×─(z©Īi)╗ŅŪ░─▄ŅA(y©┤)Ž╚ī”(du©¼)ąĶꬊ╚į«Ą─¼F(xi©żn)ł÷(ch©Żng)▀M(j©¼n)ąąįu(p©¬ng)╣└���Ż¼▀@śė┐╔ęį▌^║Ž└ĒĄ─Ęų┼õŠ╚į«Ą─╚╦┴”╬’┴”�Ż¼▀xō±ąĶę¬öyĦĄ─čbéõ║═į«ų·╬’┘YĄ╚�Ż¼ęį╠ßĖ▀Š╚į«ą¦┬╩Īó▒▄├ŌŠ╚į«╚╦åTĄ─▓╗▒žę¬Ą─é¹═÷║═ōp╩¦���ĪŻ×ķ┤╦��Ż¼╬ęéāąĶę¬ę╗╠ūąĪą═é╔£y(c©©)ŽĄĮy(t©»ng)��Ż¼▓┘ū„š▀į┌▀h(yu©Żn)Č╦┐╔ęįī”(du©¼)Ųõ▀M(j©¼n)ąą▓┘┐v�����Ż¼┴╦ĮŌŲõ▀\(y©┤n)äė(d©░ng)Ą─ĘĮ╬╗���Ż¼▓óĖąų¬¼F(xi©żn)ł÷(ch©Żng)Ą─ą┼ŽóŻ¼└²╚ńłDŽ±���Ż¼┬Ģę¶���Īó£žČ╚Īó▌Ś╔õ┴┐�ĪóرČ╚Īó═▀╦╣?ji©”)ŌČ╚Ą╚�����ĪŻī?du©¼)¼F(xi©żn)ł÷(ch©Żng)Ą─ōp║”▀M(j©¼n)ąąįu(p©¬ng)╣└�����Ż¼×ķ║¾├µ▀M(j©¼n)ąąĄ─╦čŠ╚╗Ņäė(d©░ng)ū÷║├£╩(zh©│n)éõ�ĪŻ
ĪĪĪĪ
2Ż«2 ŽĄĮy(t©»ng)ĮķĮB
ĪĪĪĪ
ė╔ė┌╬ęéāų„ę¬╩Ūßśī”(du©¼)¼F(xi©żn)ł÷(ch©Żng)╦čŠ╚Ą─ŅA(y©┤)Ž╚įu(p©¬ng)╣└Ż¼╬ęéā▓╔ė├┴╦▌å╩Į▀\(y©┤n)äė(d©░ng)Ąū▒P(p©ón)Ż¼į┌Ąū▒P(p©ón)╔ŽįO(sh©©)ėŗ(j©¼)┴╦ę╗╠ū╚½ĘĮ╬╗ÖC(j©®)ąĄ╩ų▒█ŽĄĮy(t©»ng)��Ż¼įōÖC(j©®)ÖC(j©®)ąĄ╩ų▒█ėą5éĆ(g©©)ūįė╔Č╚���Ż¼▓╔ė├▓Į▀M(j©¼n)ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)�Ż¼Ųõ═Ōė^łD╚ńłD╦∙╩Š����ĪŻėęłD×ķŲõĘ┬šµ─Żą═ĪŻį┌įō╩ų▒█░▓čbėą╩ųūź����Ż¼┐╔ė├ė┌ūź╚Ī¼F(xi©żn)ł÷(ch©Żng)śėŲĘ╗“š▀╩ŪŪÕ│²šŽĄK╬’ĪŻ
ĪĪĪĪ
ĪĪĪĪ
į┌▒Š¾w╔Ž░▓čbėąGPSČ©╬╗ŽĄĮy(t©»ng)���Ż¼▓┘ū„š▀┐╔īŹ(sh©¬)Ģr(sh©¬)šŲ╬š╠Į£y(c©©)Ų„╦∙╠ÄĄ─╬╗ų├����ĪŻį┌ęŲäė(d©░ng)ŲĮ┼_(t©ói)╔Ž░▓čbėąÄ¦įŲ┼_(t©ói)Ą─özŽ±Ņ^���Ż¼ęĢŅlłDŽ±▒╗é„▌ö?sh©┤)Į▀h(yu©Żn)Č╦�ĪŻ▓┘ū„š▀į┌▀h(yu©Żn)Č╦─▄▓┘┐vözŽ±Ņ^Ą─įŲ┼_(t©ói)ī”(du©¼)¼F(xi©żn)ł÷(ch©Żng)▀M(j©¼n)ąąė^▓ņ�����ĪŻ×ķ┴╦─▄į┌║┌ę╣▀M(j©¼n)ąąė^▓ņŻ¼į┌özŽ±Ņ^╔Ž▀Ć░▓čb┴╦╝ż╣Ō▀h(yu©Żn)╝t═Ōšš├„čbų├��Ż¼┐╔šš┴┴30-50MŠÓļxĘČć·ā╚(n©©i)Ą─Š░╬’����Ż¼Č°╣”┬╩ų╗ėą3-4WŻ¼ę╗ĘĮ├µĮĄĄ═┴╦╣”║─�Ż¼┴Ēę╗ĘĮ├µė╔ė┌▓╔ė├Ą─╩Ū▀h(yu©Żn)╝t═Ō▓©ķL(zh©Żng)▀M(j©¼n)ąąšš├„Ż¼╚╦č█┐┤▓╗ĄĮ���Ż¼▒▄├Ō┴╦ī”(du©¼)¼F(xi©żn)ł÷(ch©Żng)Ą─Ė╔ö_ĪŻį┌ŲĮ┼_(t©ói)╔Ž▀Ć▓╔ė├┴╦Ė▀ņ`├¶Č╚Ą─┬Ģę¶é„ĖąŲ„�Ż¼ūŅ▀h(yu©Żn)┐╔Ėąų¬30├ūĘČć·ā╚(n©©i)Ą─┬ĢĒæŻ¼▀@ī”(du©¼)ė┌¼F(xi©żn)ł÷(ch©Żng)┐▒£y(c©©)╔§ų┴╩Ū╠Į£y(c©©)╔·├³█EŽ¾ą┼Žóę▓╩ŪĘŪ│Żųžę¬Ą─�����ĪŻį┌╠Į£y(c©©)ÖC(j©®)śŗ(g©░u)╔Ž▀Ć░▓čb┴╦£žČ╚é„ĖąŲ„����ĪóرČ╚é„ĖąŲ„Ż¼Ė∙ō■(j©┤)ąĶę¬▀Ć┐╔Æņ▌d═▀╦╣?ji©”)ŌČ╚é„ĖąŲ„��Īó▌Ś╔õé„ĖąŲ„Ą╚Ż¼═©▀^(gu©░)¤o(w©▓)ŠĆ(xi©żn)é„ĖąŠW(w©Żng)Įj(lu©░)é„▌öĮo▓┘ū„š▀▒Ńė┌Ė³įö╝Ü(x©¼)Ą─½@Ą├ą┼Žó����ĪŻ
ĪĪĪĪ
š¹éĆ(g©©)╦čŠ╚čbų├Ą─┐žųŲŲ„ų„ę¬ė╔╚²▓┐ĘųĮM│╔Ż¼ę╗╩Ū▀\(y©┤n)äė(d©░ng)Ąū▒P(p©ón)┐žųŲŲ„��Ż¼ų„ę¬┐žųŲ▀\(y©┤n)äė(d©░ng)Ąū▒P(p©ón)Ą─▀\(y©┤n)äė(d©░ng)��ĪŻČ■╩ŪÖC(j©®)ąĄ╩ų┐žųŲŲ„���Ż¼ų„ę¬┐žųŲÖC(j©®)ąĄ╩ųĄ─▀\(y©┤n)äė(d©░ng)��Ż¼▓╔ė├╗∙ė┌ARM7║═▀\(y©┤n)äė(d©░ng)┐žųŲąŠŲ¼Ą─┐žųŲŲ„���ĪŻ╚²╩Ūųąčļ┐žųŲŲ„Ż¼ų„ę¬╩ŪģR╝»üĒ(l©ói)ūįĖ„éĆ(g©©)é„ĖąŲ„Ą─öĄ(sh©┤)ō■(j©┤)Ż©└²╚ń�Ż¼£žČ╚ĪóرČ╚Ą╚Ż®�����Ż¼▓óīó╦čŠ╚čbų├Ą─ĀŅæB(t©żi)ą┼ŽóĘ┤üĮo▓┘ū„š▀����Ż¼▓óĮė╩▄üĒ(l©ói)ūį▓┘ū„Č╦Ą├öĄ(sh©┤)╠Į£y(c©©)čbų├Ą─┐žųŲŲ„▓╔ė├╗∙ė┌ARM9Ą─ŪČ╚ļ╩Į┐žųŲŲ„
ĪĪĪĪ
ė├æ¶(h©┤)Į╗╗źčbų├ė╔ę╗┼_(t©ói)PCÖC(j©®)śŗ(g©░u)│╔��Ż¼═©▀^(gu©░)¤o(w©▓)ŠĆ(xi©żn)ŠW(w©Żng)Įj(lu©░)┼c╦čŠ╚čbų├▀M(j©¼n)ąą▀BĮė����ĪŻį┌PCÖC(j©®)╔Ž▀\(y©┤n)ąą┐é┐žĮń├µ����Ż¼▀Ć░▓čbėą╚²ŠS╩¾ś╦(bi©Īo)Ż¼═©▀^(gu©░)╦³┐╔ęįų▒Įė▓┘ū„ÖC(j©®)Ų„╩ų═Ļ│╔ŽÓæ¬(y©®ng)Ą─äė(d©░ng)ū„���ĪŻÖC(j©®)ąĄ╩ųĄ─ĀŅæB(t©żi)┐╔═©▀^(gu©░)łDą╬Ę┬šµüĒ(l©ói)ėĶęį’@╩Š�ĪŻ
ĪĪĪĪ
|