|
╗∙ė┌▒Ŗ×ķ┼dAR6520ÖC(j©®)Ų„╚╦┼cAVSęĢėXČ©╬╗Ą─▓╗═¼╣ż╝■ĘųÆ■ŽĄĮy(t©»ng)蹊┐
š┐ĮŁ╩ą╝╝ĤīW(xu©”)į║ ų▄ł“÷╬ĪĪ2019/9/30 8:32:16
ĪĪĪĪ š¬ĪĪ꬯║▒Š╬─═©▀^▒Ŗ×ķ┼dAR6520╦─▌SÖC(j©®)Ų„╚╦┼cAVSęĢėXČ©╬╗ŽĄĮy(t©»ng)Ż¼ęįęį╠½ŠW(w©Żng)═©ą┼Ą─ĘĮ╩Į�����Ż¼└¹ė├ADTVisionęĢėX▄ø╝■ī”▓╗═¼łDą╬ś╦(bi©Īo)ūóĄ─╣ż╝■▀M(j©¼n)ąąūRäe��Ż¼▓óė├ÖC(j©®)Ų„╚╦▀M(j©¼n)ąąņoæB(t©żi)ūź╚ĪĘųÆ■ĪŻ
ĪĪĪĪ
ĻP(gu©Īn)µIį~Ż║ÖC(j©®)Ų„╚╦����Ż╗ęĢėXŻ╗ęį╠½ŠW(w©Żng)���Ż╗ADTVision
ĪĪĪĪ
ųąłDĘųŅÉ╠¢Ż║TP241�����Ż╗TP391.41ĪĪĪĪĪĪĪĪĪĪĪĪ╬─½I(xi©żn)ś╦(bi©Īo)ūR┤aŻ║AĪĪĪĪĪĪĪĪĪĪĪĪ╬─š┬ŠÄ╠¢Ż║
ĪĪĪĪ
ĪĪĪĪ
Research on Different Workpiece Sorting System Based on Vision Positioning of AR6520 Robot and AVS
ĪĪĪĪ
ZHOU Yaoxin
ĪĪĪĪ
Ż©Zhanjiang Technician College�����Ż¼Zhanjiang Guangdong 524000Ż®
ĪĪĪĪ
Abstract: In this paper, by means of Ethernet communication between the 4-axis AR6520 robot and AVS visual positioning system, ADTVision visual software was used to identify the workpiece marked by different graphics, and the robot was used for static fetching and sorting.
ĪĪĪĪ
Keywords: robotics��Ż╗vision����Ż╗Ethernet�Ż╗ADTVision.
ĪĪĪĪ
ĪĪĪĪ
ÖC(j©®)Ų„╚╦ęĢėX╝╝ąg(sh©┤)╩ŪųĖųŪ─▄ŽÓÖC(j©®)║═ėŗ╦ŃÖC(j©®)ŽÓĮY(ji©”)║ŽŻ¼ęį─ŻöM╚╦ŅÉĄ─ęĢėX╣”─▄���ĪŻ▀@ę╗╝╝ąg(sh©┤)į┌3CŅI(l©½ng)ė“ó┘����ĪóŲ¹▄ć┴Ń▓┐╝■Ą─╔·«a(ch©Żn)ĪóųŲ╦ÄĄ╚ŅI(l©½ng)ė“ėąų°╚šęµÅVĘ║Ą─æ¬(y©®ng)ė├�����ĪŻSCARAŻ©Selective Compliance Assembly Robot ArmŻ®ó┌ÖC(j©®)Ų„╚╦ę“Š▀ėą▌^Ė▀Ą─╦┘Č╚��ĪóŠ½Č╚��ĪóĖ▀Č╚ęį╝░░▓čb┐šķgąĪ���ĪóįO(sh©©)ėŗūįė╔Č╚┤¾Ą╚ā×(y©Łu)³c(di©Żn)Č°Ą├ĄĮ┤¾ęÄ(gu©®)─Żæ¬(y©®ng)ė├�ĪŻ─┐Ū░�Ż¼æ¬(y©®ng)ė├ė┌čb┼õŠĆ╔ŽĄ─╣żśI(y©©)ÖC(j©®)Ų„╚╦┤¾ČÓ╩Ū═©▀^╩ŠĮ╠▓┘ū„üĒ═Ļ│╔ÖC(j©®)Ų„╚╦Ą─äėū„��Ż¼▀@śėĄ─╔·«a(ch©Żn)ŠĆ╚ßąį▌^▓Ņ����Ż¼¤oĘ©ØMūŃī”╚ßąį╔·«a(ch©Żn)ŽĄĮy(t©»ng)ó█Ą─ę¬Ū¾Ż¼╝┤īŹ¼F(xi©żn)ī”╬’┴ŽĄ─ūRäe║═Č©╬╗ūź╚Ī�����ĪŻę“┤╦Ż¼ę¬╩╣ÖC(j©®)Ų„╚╦Ēś└¹▓óŪęĖ▀ą¦Ąž═Ļ│╔╣żū„╚╬äš(w©┤)��Ż¼ätąĶę¬ę²╚ļÖC(j©®)Ų„╚╦ęĢėX╝╝ąg(sh©┤)ęį═Ļ│╔ī”╣żū„─┐ś╦(bi©Īo)Ą─ūRäe╝░Č©╬╗�����ĪŻ
ĪĪĪĪ
1ĪĪ╚╬äš(w©┤)┐žųŲę¬Ū¾
ĪĪĪĪ
▒Š╬─ų„ę¬čąŠ┐╚ń║╬└¹ė├AVSęĢėXČ©╬╗ŽĄĮy(t©»ng)Ęų▒µ▓╗═¼łD░ĖĄ─╣ż╝■�����Ż¼▓óė╔ÖC(j©®)Ų„╚╦═Ļ│╔ī”▓╗═¼łD░Ė╣ż╝■Ą─ĘųÆ■��ĪŻ
ĪĪĪĪ
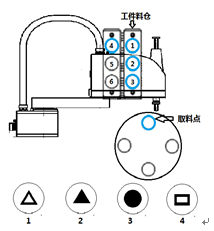
╚╬äš(w©┤)╩ŠęŌłD╚ńłD1╦∙╩Š�����ĪŻłD1ųąėą╦─éĆ▓╗═¼łD░ĖĄ─╣ż╝■�Ż¼SB1×ķåóäė░┤ŌoŻ¼SB2×ķÅ═(f©┤)╬╗░┤Ōo����ĪŻ┐žųŲę¬Ū¾×ķŻ║░┤Ž┬Å═(f©┤)╬╗░┤ŌoSB2�Ż¼ÖC(j©®)Ų„╚╦ūįäė╗žįŁ³c(di©Żn)Ż╗╩ųäėīóļSÖC(j©®)▀x╚ĪĄ─╣ż╝■Ę┼╚ļ╚Ī┴Ž³c(di©Żn)Ż¼░┤Ž┬åóäė░┤ŌoSB1�����Ż¼ęĢėXŽĄĮy(t©»ng)ūįäėūRäe╣ż╝■��Ż¼╚╗║¾ÖC(j©®)Ų„╚╦īó╣ż╝■░ß╚ļ├┐éĆłD░Ėī”æ¬(y©®ng)Ą─╣ż╬╗Ż©╚ń1╠¢łD░Ėī”æ¬(y©®ng)1╠¢╣ż╬╗Ż®���Ż¼╣ż╝■Ę┼ų├═Ļ«ģ║¾�Ż¼ÖC(j©®)Ų„╚╦ūįäėĘĄ╗žįŁ³c(di©Żn)��Ż¼Ą╚┤²Ž┬ę╗┤╬åóäė�ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD1ĪĪ╚╬äš(w©┤)╩ŠęŌłD
ĪĪĪĪ
2ĪĪė▓╝■ĮM│╔║═ė▓╝■▀BĮė
ĪĪĪĪ
2.1ĪĪė▓╝■ĮM│╔
ĪĪĪĪ
▒Ŗ×ķ┼dAR6520╦─▌SÖC(j©®)Ų„╚╦ĪŻ╬óą═╣ż┐žÖC(j©®)AMC2000EŻ║özŽ±ÖC(j©®)═©▀^ŠW(w©Żng)┐┌║═ų„ÖC(j©®)▀M(j©¼n)ąąöĄ(sh©┤)ō■(j©┤)Į╗ōQ���Ż╗ą┼╠¢Ą─▌ö╚ļ�����Īó▌ö│÷┐žųŲ╝░özŽ±ÖC(j©®)Ą─╣®ļŖŠ∙ė╔I/OĮė┐┌īŹ¼F(xi©żn)Ż╗ųĖ╩Š¤¶ė├ė┌ųĖ╩ŠözŽ±ÖC(j©®)Ą─╣żū„ĀŅæB(t©żi)�ĪŻMERŽĄ┴ąŽÓÖC(j©®)Ż║GIGEŪ¦šūŠW(w©Żng)Ż¼500╚fŽ±╦ž����Ż¼1 628(H)Ī┴1 236(V)�����Ż¼cCMOSŅÉą═����Ż¼Ä¼┬╩×ķ14fps�����Ż¼═Ō▓┐ė|░l(f©Ī)╗“▄øė|░l(f©Ī)�����Ż¼╣żū„ļŖē║12V��ĪŻComputarńRŅ^Ż║12mm�Ż¼1Ī├1.4Ż¼2/3Č©Į╣�����ĪŻŲĮ├µLED╣Ōį┤���ĪŻ’@╩ŠŲ„�����Īó╩¾ś╦(bi©Īo)���ĪóµI▒P�Īó³c(di©Żn)äė░┤Ōo����ĪŻ
ĪĪĪĪ
2.2ĪĪė▓╝■▀BĮė
ĪĪĪĪ
īóęĢėX┐žųŲŲ„▀BĮėĄĮ24Vķ_ĻP(gu©Īn)ļŖį┤╔ŽŻ¼▀BĮė║├ŽÓÖC(j©®)Ą─ļŖį┤ŠĆ�ĪóI/O┐žųŲŠĆŻ©ė╔ÖC(j©®)Ų„╚╦═Ō▓┐ė|░l(f©Ī)Ż®║═Ū¦šūŠW(w©Żng)ŠĆĪŻŽÓÖC(j©®)Ą─Ū¦šūŠW(w©Żng)ŠĆ▒žĒÜ▀BĮėĄĮŽÓÖC(j©®)īŻė├Ū¦šūŠW(w©Żng)┐┌ųąŻ©GbE3┐┌Ż®���Ż¼ęĢėX┐žųŲŲ„┼cÖC(j©®)Ų„╚╦┐žųŲŲ„ķgė├Ųš═©ŠW(w©Żng)ŠĆ▀BĮė�����ĪŻ’@╩ŠŲ„▀BĮėĄĮ’@╩ŠŲ„Įė┐┌����Ż¼µI▒P�����Īó╩¾ś╦(bi©Īo)▀BĮėĄĮUSB┐┌�����Ī�����Ż┐žųŲ░┤ŌoSB1�ĪóSB2Ęųäe▀BĮėĄĮÖC(j©®)Ų„╚╦┐žųŲŲ„Ą─öĄ(sh©┤)ūų▌ö╚ļČ╦IN1ĪóIN2����ĪŻ
ĪĪĪĪ
3ĪĪ▄ø╝■ĮM│╔
ĪĪĪĪ
▒ŠĒŚ─┐╦∙ąĶĄ─▄ø╝■ėąŽÓÖC(j©®)“ī(q©▒)äėĪó╝ė├▄╣Ę“ī(q©▒)äė����ĪóADTvision║═LUAÖC(j©®)Ų„╚╦│╠ą“ŠÄ▌ŗš{(di©żo)įćĪŻ
ĪĪĪĪ
3.1ĪĪŽÓÖC(j©®)“ī(q©▒)äėįO(sh©©)ų├
ĪĪĪĪ
ļpō¶åóäėū└├µ╔ŽĄ─ │╠ą“�����ĪŻ
ĪĪĪĪ
╚ń╣¹ŠW(w©Żng)┐©IPĄžųĘ║═ŽÓÖC(j©®)ĄžųĘ▓╗į┌═¼ę╗ŠW(w©Żng)Č╬Ģr�Ż¼ŽÓÖC(j©®)IPĄžųĘĢ■ęį╝t╔½’@╩Š��ĪŻ┤╦Ģr���Ż¼┐╔ęįą▐Ė─ŠW(w©Żng)┐©Ą─IPĄžųĘŻ¼ę▓┐╔ęįų▒Įėį┌įōĮń├µą▐Ė─ŽÓÖC(j©®)Ą─IPĄžųĘ����Ż¼▒žĒÜ▒ŻūCŠW(w©Żng)┐©IPĄžųĘ║═ŽÓÖC(j©®)IPĄžųĘĄ─Ū░╚²éĆöĄ(sh©┤)ūųČ╬ę╗ų┬Ż¼ūŅ║¾ę╗éĆ┐╔ęį▓╗═¼���ĪŻą▐Ė─║├IPĄžųĘ║¾��Ż¼ŽÓÖC(j©®)Ą─IPĄžųĘ╚ń╣¹ęį║┌╔½’@╩Šät▒Ē╩Šą▐Ė─│╔╣”���Ż¼┤╦Ģr³c(di©Żn)ō¶▒Ż┤µįO(sh©©)ų├Š═Ż©╬┤═ĻŻ¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|