|
╗∙ė┌▒Ŗ×ķ┼dAR6520ÖC(j©®)Ų„╚╦┼cAVSęĢėXČ©╬╗Ą─▓╗═¼╣ż╝■ĘųÆ■ŽĄĮy(t©»ng)蹊┐
š┐ĮŁ╩ą╝╝ĤīW(xu©”)į║ ų▄ł“÷╬ĪĪ2019/9/30 8:32:16
Ż©Įė╔ŽĒōŻ®Ī░Į^ī”╬╗ų├Ī▒�����Ż¼╣┤▀xĪ░─Ż░Õ├¹ĘQĪ▒����ĪŻ
ĪĪĪĪ
3.4ĪĪAR8520ÖC(j©®)Ų„╚╦ģóöĄ(sh©┤)įO(sh©©)Č©
ĪĪĪĪ
3.4.1ĪĪęĢėX┼õų├ĪŻį┌ÖC(j©®)Ų„╚╦╣ż│╠─┐õøŽ┬╠Ē╝ėęĢėX��Ż¼▀M(j©¼n)╚ļĪ░ęĢėX┼õų├Ī▒���Ż¼▀xō±Ī░CAM0Ī▒ŽÓÖC(j©®)Ż¼Ī░UDPĪ▒ŠW(w©Żng)Įj(lu©░)─Ż╩ĮŻ¼IP×ķęĢėX┐žųŲŲ„ųą┼cÖC(j©®)Ų„╚╦▀BĮėĄ─IP�Ż¼ŠW(w©Żng)Įj(lu©░)ė|░l(f©Ī)Ė±╩Įę¬┼cĪ░ŽÓÖC(j©®)ū„śI(y©©)įO(sh©©)ų├Ī▒ųą▌ö│÷ā╚(n©©i)╚▌╣┤▀xĄ─ę╗ų┬ĪŻ
ĪĪĪĪ
3.4.2ĪĪŠÄīæÖC(j©®)Ų„╚╦│╠ą“▓ó╝ė▌d���ĪŻ┤“ķ_Ī░LUAÖC(j©®)Ų„╚╦│╠ą“ŠÄ▌ŗĪ▒▄ø╝■��Ż¼ŠÄīæ│╠ą“▓ó▒Ż┤µ║¾����Ż¼╩╣ė├╩ŠĮ╠Ų„īó▒Ż┤µĄ─│╠ą“╝ė▌dĄĮÖC(j©®)Ų„╚╦┐žųŲŲ„ųą��Ż¼▓óī”ŽÓĻP(gu©Īn)╬╗ų├³c(di©Żn)▀M(j©¼n)ąą╩ŠĮ╠�����ĪŻ
ĪĪĪĪ
4ĪĪ┐éĮY(ji©”)
ĪĪĪĪ
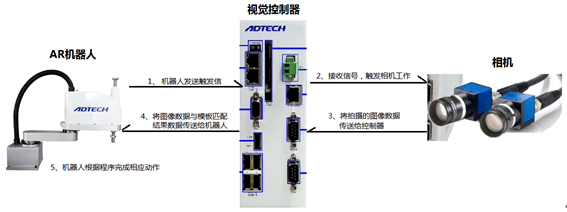
▒Š╚╬äš(w©┤)ų„ę¬ė╔ęĢėX┐žųŲŲ„�ĪóŽÓÖC(j©®)║═ÖC(j©®)Ų„╚╦ĮM│╔Ż¼ęĢėX┐žųŲŲ„ū„×ķĘ■äš(w©┤)Ų„����Ż¼ž×═©ų°╚²š▀ķgĄ─═©ą┼▀BĮėĪŻ╣żū„▀^│╠╚ńłD2╦∙╩Š���ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD2ĪĪęĢėX┐žųŲŲ„�ĪóŽÓÖC(j©®)║═ÖC(j©®)Ų„╚╦ų«ķgĄ─ĻP(gu©Īn)ŽĄ╝░╣żū„┴„│╠
ĪĪĪĪ
▒Š╚╬äš(w©┤)Ą─įO(sh©©)ėŗ(j©¼)ā╚(n©©i)╚▌┐╔ęįĘų×ķ╚²▓┐ĘųŻ║Ą┌ę╗▓┐ĘųŻ¼ŽÓÖC(j©®)║═ÖC(j©®)Ų„╚╦┼cęĢėX┐žųŲŲ„ų«ķgĄ─ęį╠½ŠW(w©Żng)═©ą┼įO(sh©©)ų├�����Ż╗Ą┌Č■▓┐Ęų�Ż¼▓╗═¼łDą╬─Ż░ÕĄ─äō(chu©żng)Į©Ż╗Ą┌╚²▓┐Ęų���Ż¼ÖC(j©®)Ų„╚╦│╠ą“įO(sh©©)ėŗ(j©¼)����ĪŻ
ĪĪĪĪ
į┌ęĢėX┐žųŲŲ„ųąįO(sh©©)ų├IPĄžųĘĢr(sh©¬)�����Ż¼ė╔ė┌┐žųŲŲ„╝╚┼cÖC(j©®)Ų„╚╦▀BĮėėų┼cŽÓÖC(j©®)▀BĮė���Ż¼ę“┤╦�����Ż¼┐žųŲŲ„ųąėąā╔éĆ(g©©)Ī░▒ŠĄž▀BĮėĪ▒��Ż¼ŲõųąĪ░▒ŠĄž▀BĮėĪ▒ĀŅæB(t©żi)ųąĪ░╦┘Č╚Ī▒×ķ100.0MbpsĄ─×ķ┼cÖC(j©®)Ų„╚╦▀BĮėČ╦┐┌��Ż¼Ī░╦┘Č╚Ī▒×ķ1.0GbpsĄ─×ķ┼cŽÓÖC(j©®)▀BĮėČ╦┐┌����ĪŻ▀@ų„ę¬╩Ūę“?y©żn)ķ┐žųŲŲ„ųąŽÓÖC(j©®)īŻė├ŠW(w©Żng)┐┌×ķŪ¦šūŠW(w©Żng)┐┌�����ĪŻ
ĪĪĪĪ
į┌ÖC(j©®)Ų„╚╦Ī░ęĢėX┼õų├Ī▒ųą����Ż¼ŠW(w©Żng)Įj(lu©░)ė|░l(f©Ī)Ė±╩Įę¬┼cŠW(w©Żng)Įj(lu©░)Įė╩šĖ±╩Įī”æ¬(y©®ng)ĪŻ
ĪĪĪĪ
į┌äō(chu©żng)Į©łDŽ±─Ż░Õ▓╔╝»Ū░�����Ż¼æ¬(y©®ng)Ž╚═Ļ│╔Ī░ęį╠½ŠW(w©Żng)Ī▒įO(sh©©)ų├▓óīóŠW(w©Żng)┐┌┤“ķ_���Ż¼ę“?y©żn)ķį┌▒Š╚╬ä?w©┤)ųą�����Ż¼╣Pš▀īóęĢėX┐žųŲŲ„ū„×ķĘ■äš(w©┤)Ų„�����ĪŻ
ĪĪĪĪ
ūóßīŻ║
ĪĪĪĪ
ó┘╦∙ų^3CŠ═╩ŪļŖ─XComputer�Īó═©ą┼Communication║═Ž¹┘M(f©©i)ąįļŖūėConsumer ElectronicĪŻ
ĪĪĪĪ
ó┌SCARAŻ©Selective Compliance Assembly Robot Arm��Ż¼▀xō±Ēśæ¬(y©®ng)ąįčb┼õÖC(j©®)Ų„╩ų▒█Ż®╩Ūę╗ĘNłAų∙ū°ś╦(bi©Īo)ą═Ą─╠ž╩ŌŅÉą═Ą─╣żśI(y©©)ÖC(j©®)Ų„╚╦����Ż¼ūŅ▀mė├ė┌ŲĮ├µČ©╬╗ĪŻ
ĪĪĪĪ
ó█╚ßąįųŲįņ╩ŪųĖį┌ėŗ(j©¼)╦ŃÖC(j©®)ų¦│ųŽ┬��Ż¼─▄▀mæ¬(y©®ng)╝ė╣żī”Ž¾ūā╗»Ą─ųŲįņŽĄĮy(t©»ng)�����ĪŻ
ĪĪĪĪ
ĪĪĪĪ
ģó┐╝╬─½I(xi©żn)Ż║
ĪĪĪĪ
[1]║╬╝ę║Ń.╗∙ė┌▒Ŗ×ķ┼dar5215ÖC(j©®)ąĄ▒█╝░avs1100ęĢėXūź╚Īæ¬(y©®ng)ė├[J].┐Ų╝╝ęĢĮń���Ż¼2017Ż©6Ż®Ż║28-29.
ĪĪĪĪ
[2]ĄįŠ┤├Ę;ČŁ∙i’w;ÅłĶF.╗∙ė┌ęĢėXę²ī¦(d©Żo)Ą─╣żśI(y©©)ÖC(j©®)Ų„╚╦Č©╬╗ūź╚ĪŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)[J].ÖC(j©®)ąĄįO(sh©©)ėŗ(j©¼)┼c蹊┐���Ż¼2014Ż©5Ż®.
ĪĪĪĪ
[3]└Ņüåéź;╗∙ė┌ÖC(j©®)Ų„ęĢėXĄ─╣ż╝■ĘųÆ■ŽĄĮy(t©»ng)蹊┐[D];╔Ž║Ż╣ż│╠╝╝ąg(sh©┤)┤¾īW(xu©”);2016─Ļ.
ĪĪĪĪ
|