|
ĻP(gu©Īn)ė┌Ų¹▄ć(ch©ź)ļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)ŽĄĮy(t©»ng)┐žųŲĄ─Ęų╬÷
ĮŁ╠K╩Īąņų▌Įø(j©®ng)┘Q(m©żo)Ė▀Ą╚┬ÜśI(y©©)īW(xu©”)ąŻ ÖÓ(qu©ón)ņoĪĪ2020/1/29 10:08:50
ĪĪĪĪ š¬ę¬Ż║ųŲäė(d©░ng)ŽĄĮy(t©»ng)╩Ū┤_▒ŻŲ¹▄ć(ch©ź)ĘĆ(w©¦n)Č©▀\(y©┤n)ąąĄ─╗∙ĄA(ch©│)�����Ż¼×ķĖ³║├šŲ╬š▄ć(ch©ź)▌vųŲäė(d©░ng)ė░Ēæę“╦ž�����Ż¼šµš²īŹ(sh©¬)¼F(xi©żn)Ų¹▄ć(ch©ź)░▓╚½▀\(y©┤n)ąąĪŻ╬─š┬ßśī”(du©¼)é„Įy(t©»ng)Ų¹▄ć(ch©ź)ųŲäė(d©░ng)ŽĄĮy(t©»ng)┤µį┌Ą─å¢(w©©n)Ņ}�Ż¼ī”(du©¼)Ų¹▄ć(ch©ź)ļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)ŽĄĮy(t©»ng)Ę┬šµĘų╬÷��Īóā×(y©Łu)╗»įO(sh©©)ėŗ(j©¼)��Ż¼×ķŲ¹▄ć(ch©ź)ļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)įO(sh©©)ėŗ(j©¼)╝╝ąg(sh©┤)░l(f©Ī)š╣╠ß╣®ģó┐╝�ĪŻ
ĪĪĪĪ
ĻP(gu©Īn)µIį~Ż║Ų¹▄ć(ch©ź)Ż╗ļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)����Ż╗Ę┬šµŻ╗
ĪĪĪĪ
ĪĪĪĪ
į┌┐Ų╝╝▓╗öÓ░l(f©Ī)š╣Ą─▒│Š░Ž┬����Ż¼Į^ī”(du©¼)Ą─░▓╚½ąį╩Ū╚╦éāī”(du©¼)Ų¹▄ć(ch©ź)«a(ch©Żn)ŲĘĄ─ųžę¬ę¬Ū¾ų«ę╗ĪŻ¼F(xi©żn)┤·╗»Ų¹▄ć(ch©ź)�Ż¼╚╦éā┐╔═©▀^(gu©░)┴╦ĮŌŲõīŹ(sh©¬)ļHųŲäė(d©░ng)ąį╝░ę╗¾w╗»Ąū▒P(p©ón)Ą╚ĻP(gu©Īn)µI╝╝ąg(sh©┤)Ż¼šµš²┴╦ĮŌŲ¹▄ć(ch©ź)░▓╚½ąį─▄Ī�����Ż¼F(xi©żn)┤·╗»Ų¹▄ć(ch©ź)ļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)ŽĄĮy(t©»ng)Ż©║å(ji©Żn)ĘQEMBŻ®�����Ż¼Ųõ═©▀^(gu©░)┼cŲõ╦¹▓┐╝■║═CAN╝»│╔Ż¼Į©┴óŠC║Ž┐žųŲŽĄĮy(t©»ng)��ĪŻŽ┬╬─ßśī”(du©¼)īŹ(sh©¬)ļH▓┐╝■ģóöĄ(sh©┤)����Ż¼ī”(du©¼)EMBÖC(j©®)ąĄł╠(zh©¬)ąą╝░ļŖÖC(j©®)ł╠(zh©¬)ąąĄ╚Į©─ŻĪóäė(d©░ng)┴”īW(xu©”)Ęų╬÷���Ż¼║═é„Įy(t©»ng)ųŲäė(d©░ng)ŽĄĮy(t©»ng)▒╚ī”(du©¼)�Ż¼“×(y©żn)ūCŽĄĮy(t©»ng)ā×(y©Łu)įĮąį���Ż¼ī”(du©¼)Į±║¾Ė³║├═Ļ╔ŲįO(sh©©)ėŗ(j©¼)╠ß╣®ģó┐╝����ĪŻ
ĪĪĪĪ
1.é„Įy(t©»ng)Ų¹▄ć(ch©ź)ųŲäė(d©░ng)ŽĄĮy(t©»ng)Ą─╚▒Ž▌
ĪĪĪĪ
é„Įy(t©»ng)Ų¹▄ć(ch©ź)ųŲäė(d©░ng)ęįHB��ĪóEHBŠĆ┐žę║ē║ųŲäė(d©░ng)�����Ż¼EHBŽĄĮy(t©»ng)╩Ūį┌HBŽĄĮy(t©»ng)╔Ž░l(f©Ī)š╣üĒ(l©ói)Ą─��Ż¼ŽÓ▌^ė┌é„Įy(t©»ng)ę║ē║ųŲäė(d©░ng)Ų„Ż¼EHB▓╔ė├ę╗¾w╗»ųŲäė(d©░ng)�����Ż¼ųŲäė(d©░ng)Ģr(sh©¬)ķgČ╠�����Ż¼ųŲäė(d©░ng)ą¦╣¹═╗│÷���Ż¼ŽĄĮy(t©»ng)▓┘ū„║å(ji©Żn)å╬Ż¼įļ┬ĢąĪ��Ż¼Ūę¤o(w©▓)ąĶšµ┐ščbų├▌oų·��Ż¼ā×(y©Łu)įĮąį═╗│÷���ĪŻĄ½╩Ū�����Ż¼EHBųŲäė(d©░ng)ŽĄĮy(t©»ng)╣▄┬ĘÅ═(f©┤)ļs����Ż¼čb┼õ╝░ŠSą▐▓╗▒ŃŻ¼Ēææ¬(y©®ng)▓╗╝░Ģr(sh©¬)���Ż¼ŪęųŲäė(d©░ng)ę║Ģ■(hu©¼)╬█╚ŠŁh(hu©ón)Š│���Ż¼ąĶį┌įŁėą╝╝ąg(sh©┤)╔Ž▀M(j©¼n)ę╗▓ĮĖ─▀M(j©¼n)ĪŻ
ĪĪĪĪ
2.ļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)ŽĄĮy(t©»ng)ā×(y©Łu)╗»ĘĮŽ“
ĪĪĪĪ
ļŖ┐ž╩ŪŲ¹▄ć(ch©ź)ųŲäė(d©░ng)ą┬ĘĮŽ“�Ż¼īóļŖ┐žå╬į¬╚┌╚ļŲ¹▄ć(ch©ź)ę║ē║ųŲäė(d©░ng)ŽĄĮy(t©»ng)Ż¼ķ_(k©Īi)░l(f©Ī)╚½ą┬▄ć(ch©ź)▌vļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)ŽĄĮy(t©»ng)Ż©║å(ji©Żn)ĘQEMBŻ®���Ż¼┐╔ĮŌøQé„Įy(t©»ng)ųŲäė(d©░ng)ŽĄĮy(t©»ng)╚▒Ž▌����Ż¼╠ßĖ▀ųŲäė(d©░ng)ą¦╣¹�����ĪŻ
ĪĪĪĪ
2.1╣żū„įŁ└Ē
ĪĪĪĪ
ļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)ŽĄĮy(t©»ng)ų„ę¬ė╔ļŖÖC(j©®)�ĪóųŲäė(d©░ng)Ų„Īó┐žųŲŲ„Ż©ECUŻ®�����Īóé„äė(d©░ng)čbų├Ą╚ĮM│╔�ĪŻŲ¹▄ć(ch©ź)ųŲäė(d©░ng)�Ż¼ųŲäė(d©░ng)╠ż░Õ╔Žé„ĖąŲ„īóöĄ(sh©┤)ō■(j©┤)é„╦═ĮoRCUŻ©ĮKČ╦┐žųŲŲ„Remote Control Units�Ż¼╝µ?zh©©n)õ┐žųŲ║══©ą┼╣”─▄Ż®Ż¼═©▀^(gu©░)╠ż░Õ╦┘Č╚╝░╬╗ęŲŪķørĘų╬÷±{±éåTīŹ(sh©¬)ļH±{±éŪķør��Ż¼ęį┤╦═ŲöÓ╩ŪŠo╝▒ųŲäė(d©░ng)╗“▀Ć╩Ūš²│ŻųŲäė(d©░ng)[4]�����ĪŻųŲäė(d©░ng)ųą���Ż¼ECUīóųŲäė(d©░ng)┴”Īó▄ć(ch©ź)▌åé„Ėą┴”Ą╚▀M(j©¼n)ąąĘų╬÷�Ż¼ęį┐žųŲ╦ŃĘ©ėŗ(j©¼)╦ŃŻ¼Ą├ĄĮļŖē║┐žųŲą┼╠¢(h©żo)�����Ż¼£p╦┘Ų„£p╦┘�Ż¼Įø(j©®ng)ØLäė(d©░ng)ĮzĖ▄ÖC(j©®)śŗ(g©░u)▐D(zhu©Żn)ōQą²▐D(zhu©Żn)▀\(y©┤n)äė(d©░ng)×ķęŲäė(d©░ng)▀\(y©┤n)ąąŻ¼īŹ(sh©¬)¼F(xi©żn)▄ć(ch©ź)▌åųŲäė(d©░ng)╝░ųŲäė(d©░ng)ēKē║Šo┴”┐žųŲ��ĪŻ═Ļ│╔║¾�����Ż¼F(xi©żn)lexRayīóą┼╠¢(h©żo)é„▀fĮoECUŻ¼ECUīóą┼╠¢(h©żo)é„▀fĮoļŖÖC(j©®)[5]���ĪŻ
ĪĪĪĪ
2.2┐žųŲ─┐ś╦(bi©Īo)
ĪĪĪĪ
┐žųŲ─┐ś╦(bi©Īo)Ęų×ķęįŽ┬ÄūéĆ(g©©)Ż║
ĪĪĪĪ
2.2.1╠ż░Õ┴”Ėą┐žųŲ���Ż¼ā×(y©Łu)╗»ųŲäė(d©░ng)ĖąėX(ju©”)ĪŻ
ĪĪĪĪ
2.2.2ī”(du©¼)▄ć(ch©ź)▌åļŖÖC(j©®)┐žųŲ�����Ż¼īŹ(sh©¬)Ģr(sh©¬)┐žųŲ▄ć(ch©ź)▌åųŲäė(d©░ng)┴”Šž�����Ż¼═¼Ģr(sh©¬)īŹ(sh©¬)¼F(xi©żn)ABSųŲäė(d©░ng)Ę└▒¦╦└����ĪŻ
ĪĪĪĪ
2.2.3ųŲäė(d©░ng)┴”Ęų┼õŻ¼║¼▄ć(ch©ź)Ū░║¾▌SųŲäė(d©░ng)┴”Ęų┼õ�����Īóį┘╔·ųŲäė(d©░ng)┐žųŲ�ĪŻ
ĪĪĪĪ
2.2.4▐D(zhu©Żn)Ž“Īó“ī(q©▒)äė(d©░ng)╝░ųŲäė(d©░ng)ŽĄĮy(t©»ng)╝»│╔┐žųŲ���Ż¼īŹ(sh©¬)¼F(xi©żn)ESP�ĪóASR╣”─▄ĪŻ
ĪĪĪĪ
3.▄ć(ch©ź)▌vųŲäė(d©░ng)╣▄äė(d©░ng)┴”īW(xu©”)─Żą═╝░ųŲäė(d©░ng)Ę┬šµĘų╬÷
ĪĪĪĪ
3.1ųŲäė(d©░ng)─Żą═
ĪĪĪĪ
ųŲäė(d©░ng)─Żą═░³║¼š¹▄ć(ch©ź)ųŲäė(d©░ng)�����Īó┐žųŲŲ„�����Īó▌å╠ź─Żą═╝░ųŲäė(d©░ng)ŽĄĮy(t©»ng)─Żą═Ą╚���ĪŻ
ĪĪĪĪ
3.1.1š¹▄ć(ch©ź)ųŲäė(d©░ng)
ĪĪĪĪ
Ęų×ķļp▌å─Żą═����Īó╦─▌å─Żą═���Īó1/4─Żą═ĪŻŽ┬╬─ęį1/4─Żą═×ķ└²Ęų╬÷����ĪŻ
ĪĪĪĪ
3.1.2▌å╠ź
ĪĪĪĪ
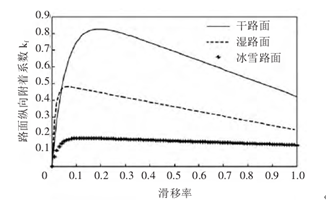
▌å╠ź─Żą═▒Ēš„ųŲäė(d©░ng)×ķ┬Ę├µ┐vŽ“ĖĮų°ŽĄöĄ(sh©┤)╝░▌å╠ź╗¼ęŲ┬╩ų«ķgĻP(gu©Īn)ŽĄŻ¼┬Ę├µĖĮų°ŽĄöĄ(sh©┤)×ķ▌ö│÷�Ż¼▌å╠ź╗¼ęŲ┬╩×ķ▌ö╚ļ���ĪŻėŗ(j©¼)╦Ń┐╔ßśī”(du©¼)▌å╦┘Īó▄ć(ch©ź)╦┘����Ż¼ėŗ(j©¼)╦Ń╗¼ęŲ┬╩Ż¼ęį▓ķ▒Ē─ŻēKæ¬(y©®ng)ė├�Ż¼▓ķšę┬Ę├µ┐vŽ“ĖĮų°ŽĄöĄ(sh©┤)ĪŻįō蹊┐ęįBurckhardt─Żą═ų¦│ų����Ż¼╚ńłD1Ż¼łDųąĘų╬÷Ė╔ر┬Ę├µ����Īó▒∙č®┬Ę├µūŅ╝č╗¼ęŲ┬╩Ż¼Ęųäe×ķ0.2���Īó0.08�����Īó0.15�ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD1 ▓╗═¼┬Ę├µ╗¼ęŲ┬╩╝░ĖĮų°ŽĄöĄ(sh©┤)
ĪĪĪĪ
3.1.3ļŖ┐žÖC(j©®)ąĄųŲäė(d©░ng)
ĪĪĪĪ
─Żą═ė╔£p╦┘Ų„ĪóųŲäė(d©░ng)Ų„�����ĪóļŖÖC(j©®)�����ĪóĮzĖ▄é„äė(d©░ng)─Żą═Ą╚ĮM│╔�����Ż¼ļŖÖC(j©®)┴”Šž▌ö╚ļ�����Ż¼ęįųŲäė(d©░ng)┴”Šž═Ļ│╔▌ö│÷�����ĪŻ
ĪĪĪĪ
3.1.4┐žųŲŲ„
ĪĪĪĪ
ęįPIDųŲäė(d©░ng)┐žųŲ��Ż¼┐žųŲŲ„─Żą═▌ö╚ļīŹ(sh©¬)ļH╗¼ęŲ┬╩╝░ūŅ╝č╗¼ęŲ┬╩▓Ņ�Ż¼ļŖÖC(j©®)┴”Šž×ķŲ┌═¹▌ö│÷�ĪŻ
ĪĪĪĪ
3.2ųŲäė(d©░ng)Ę┬šµ
ĪĪĪĪ
×ķ╠ßĖ▀蹊┐ą┼Ę■┴”Ż¼ī”(du©¼)▓╗═¼▄ć(ch©ź)▌vĪó▓╗═¼┬Ę├µųŲäė(d©░ng)▀M(j©¼n)ąąčąŠ┐�����Ż¼čąŠ┐ī”(du©¼)▄ć(ch©ź)▌vį┌▓╗═¼┬Ę├µųŲäė(d©░ng)įć“×(y©żn)�����Ż¼▓╗═¼┬Ę├µęį80km/h╦┘Č╚ųŲäė(d©░ng)���Ż¼╩®╝ėųŲäė(d©░ng)┴”ŠžļA▄S▌ö╚ļ─ŻöMŠo╝▒ųŲäė(d©░ng)Ż║
ĪĪĪĪ
3.2.1Ė╔į’┬Ę├µ����Ż¼ī”(du©¼)▄ć(ch©ź)▌vųŲäė(d©░ng)┴”Šžī”(du©¼)ųŲäė(d©░ng)Ą─ė░Ēæ▒╚ī”(du©¼)Ęų╬÷�����Ż¼╚¶ųŲäė(d©░ng)┴”Šž═¼ĖĮų°┴”Ž▐Č©ųŲäė(d©░ng)┬ĘŠų?j©½n)?sh©┤)ō■(j©┤)▌^ąĪ�����Ż¼▄ć(ch©ź)▌vųŲäė(d©░ng)ąĶ3.1s��Ż¼ųŲäė(d©░ng)ķL(zh©Żng)Č╚34.5m����Ż╗╚¶ųŲäė(d©░ng)┴”Šž╝░Ž▐Č©ųŲäė(d©░ng)┴”Šž▌^Ė▀�����Ż¼īóī¦(d©Żo)ų┬ųŲäė(d©░ng)ķL(zh©Żng)Č╚į÷╝ė��Ż¼▄ć(ch©ź)▌å▒¦╦└����Ż¼Š▀¾wųŲäė(d©░ng)Ģr(sh©¬)ķg5.1s���Ż¼ųŲäė(d©░ng)ŠÓļx55.2m����ĪŻ
ĪĪĪĪ
3.2.2ر╗¼┬Ę├µ�����Ż¼╚¶ųŲäė(d©░ng)┴”Šž═¼ĖĮų°┴”Ž▐Č©ųŲäė(d©░ng)┬ĘŠų?j©½n)?sh©┤)ō■(j©┤)▌^ąĪ�Ż¼▄ć(ch©ź)▌vųŲäė(d©░ng)ąĶ5.8sŻ¼ųŲäė(d©░ng)ķL(zh©Żng)Č╚63.6m���Ż╗╚¶ųŲäė(d©░ng)┴”Šž╝░Ž▐Č©ųŲäė(d©░ng)┴”Šž▌^Ė▀�Ż¼Š▀¾wųŲäė(d©░ng)Ģr(sh©¬)ķg9.8s���Ż¼ųŲäė(d©░ng)ŠÓļx105.8m�����ĪŻ
ĪĪĪĪ
3.2.3▒∙č®┬Ę├µ���Ż¼╚¶ųŲäė(d©░ng)┴”Šž═¼ĖĮų°┴”Ž▐Č©ųŲäė(d©░ng)┬ĘŠų?j©½n)?sh©┤)ō■(j©┤)▌^ąĪŻ¼▄ć(ch©ź)▌vųŲäė(d©░ng)ąĶ13.5s���Ż¼ųŲäė(d©░ng)ķL(zh©Żng)Č╚151m����Ż╗╚¶ųŲäė(d©░ng)┴”Šž╝░Ž▐Č©ųŲäė(d©░ng)┴”Šž▌^Ė▀�����Ż¼Š▀¾wųŲäė(d©░ng)Ģr(sh©¬)ķg16.1s����Ż¼ųŲäė(d©░ng)ŠÓļx176.6mŻ¼▄ć(ch©ź)▌å▒¦╦└����Ż¼ät▄ć(ch©ź)▌v╬ŻļU(xi©Żn)▌^┤¾���ĪŻ
ĪĪĪĪ
ŠC╔Ž╦∙╩÷Ż¼═¼Ż©╬┤═Ļ�����Ż¼Ž┬ę╗Ēō(y©©)Ż®
ĪĪĪĪ
|