|
ĻP(gu©Īn)ė┌Ų¹▄ćļŖ┐žÖCąĄųŲäėŽĄĮy(t©»ng)┐žųŲĄ─Ęų╬÷
ĮŁ╠K╩Īąņų▌Įø(j©®ng)┘Q(m©żo)Ė▀Ą╚┬ÜśI(y©©)īW(xu©”)ąŻ ÖÓ(qu©ón)ņoĪĪ2020/1/29 10:08:50
Ż©Įė╔ŽĒōŻ®Ė╔┬Ę├µĄ└┬Ęąą±éŽÓ▒╚�����Ż¼Ø±╗¼┬Ę├µ▄ć▌vĖ▀╦┘ąą±éŽ┬ųŲäė��Ż¼Č╠Ģrķg│÷¼F(xi©żn)▒¦╦└Ż¼╗¼ęŲ┬╩100%���Ż¼Ū꥞├µĖĮų°ŽĄöĄ(sh©┤)▌^Ą═Ż¼ī¦(d©Żo)ų┬ųŲäėŠÓļxčėķL����ĪŻ═¼Ø±╗¼┬Ę├µŻ¼▒∙č®┬Ę├µĖ▀╦┘ąą▄ćĢrųŲäė�Ż¼▒¦╦└ĢrķgČ╠Ż¼╦▓ķgą╬│╔▒¦╦└�����Ż¼╗¼ęŲ┬╩100%��Ż¼ŽÓ▌^ė┌ر╗¼┬Ę├µ�Ż¼▒∙č®┬Ę├µĖĮų°ŽĄöĄ(sh©┤)Ė³Ą═Ż¼ųŲäėŠÓļxĖ³ķL��ĪŻ▄ć▌vį┌ĖĮų°ŽĄĮy(t©»ng)▌^Ą═┬Ę├µĖ▀╦┘ąą±éĢrųŲäė��Ż¼╬┤┐žųŲĘ└▒¦╦└�����Ż¼ät║▄┐╔─▄│÷¼F(xi©żn)Ę└▒¦╦└����Ż¼ī¦(d©Żo)ų┬░▓╚½╩┬╣╩░l(f©Ī)╔·����ĪŻ
ĪĪĪĪ
3.3ęį▀zé„╦ŃĘ©ā×(y©Łu)╗»PIDģóöĄ(sh©┤)
ĪĪĪĪ
ęįMATLAB▄ø╝■▓┘ū„ų¦│ų��Ż¼ī”▄ć▌vļŖ┐žÖCąĄųŲäė▓▀┬įĘ┬šµłDą╬Įń├µįO(sh©©)ėŗĘų╬÷���Ż¼ęį▄ø╝■▓┘ū„�����Ż¼ė├æ¶īó▄ć▌v▌å╠ź╝░š¹▄ćī”æ¬(y©®ng)ģóöĄ(sh©┤)▌ö╚ļĄĮŽĄĮy(t©»ng)ųą�����Ż¼³cō¶┐žųŲ╦ŃĘ©░┤Ōo�Ż¼┐╔čĖ╦┘½@╚Ī▄ć▌vųŲäėą┼Žó����Ż¼½@╚Īų▒ė^Ą─Ęų╬÷öĄ(sh©┤)ō■(j©┤)ĪŻ┤╦═Ō���Ż¼╬─š┬ęį▀zé„╦ŃĘ©ī”PIDģóöĄ(sh©┤)ā×(y©Łu)╗»��Ż¼ęį┤╦īŹ¼F(xi©żn)┐ņ╦┘ųŲäė����ĪŻę╗ą®Å═(f©┤)ļsĄ─ŽĄĮy(t©»ng)ā×(y©Łu)╗»����Ż¼▓╔ė├▀zé„╦ŃĘ©ļSÖCā×(y©Łu)╗»╦č╦„Ż¼┐╔į┌ę╗Ģrķgī”┐šķgųąĖ„éĆ³c╬╗┐ņ╦┘╦č╦„����Ż¼īŹ¼F(xi©żn)╚½Šų╩šö┐ĪŻę“┤╦����Ż¼┐╔└¹ė├─Żą═ā×(y©Łu)╗»įO(sh©©)ėŗŻ¼═©▀^PID┐žųŲģóöĄ(sh©┤)ųąĘeĘųŽĄĮy(t©»ng)�Īó╬óĘųŽĄöĄ(sh©┤)╝░▒╚└²ŽĄöĄ(sh©┤)Ż¼Ą├ĄĮūā┴┐���Ż¼į┌╣╠Č©ķLČ╚┬Ę├µ╔Ž�Ż¼ęįųŲäėīŹļH╗¼ęŲ┬╩╝░└ĒŽļĄ─╗¼ęŲ┬╩ų«▓ŅŠ∙ĘĮĖ∙ęĢū„─┐ś╦║»öĄ(sh©┤)�Ż¼ā×(y©Łu)╗»Ė„ĒŚ╝s╩°Śl╝■Ż¼ęįMATLABųąĪ░╣żŠ▀ŽõĪ▒Ą─╦ŃĘ©Ū¾ĮŌ─┐ś╦║»öĄ(sh©┤)Ż¼ęį½@╚Ī▄ć▌vĘĆ(w©¦n)Č©ąį╠ßĖ▀Ą─└Ēšō╗∙ĄA(ch©│)��ĪŻų«║¾ī”ų„│╠ą“M╬─╝■╝░─┐ś╦║»öĄ(sh©┤)Ą─M╬─╝■ŠÄīæ���Ż¼Ą├ĄĮĄ─└ĒŽļ┐žųŲģóöĄ(sh©┤)Ą─ūŅĮKā×(y©Łu)╗»���ĪŻ
ĪĪĪĪ
į┌┤╦┤╬蹊┐ųąŻ¼ī”▓╗═¼┬Ę├µŪķørŽ┬┐žųŲģóöĄ(sh©┤)ā×(y©Łu)╗»�Ż¼░l(f©Ī)¼F(xi©żn)Ż║Ż©1Ż®į┌Ė╔į’┬Ę├µŽ┬Ż¼ųŲäėĢrķg2.6s�����Ż¼ųŲäėŠÓļx29.4m�Ż¼Įø(j©®ng)▒╚ī”░l(f©Ī)¼F(xi©żn)ØMūŃć°╝ęųŲäėęÄ(gu©®)ĘČĪŻŻ©2Ż®į┌ر╗¼┬Ę├µ�Ż¼ųŲäėĢrķg4.6sŻ¼ųŲäėŠÓļx51.4m�ĪóĮø(j©®ng)▒╚ī”░l(f©Ī)¼F(xi©żn)ØMūŃć°╝ęųŲäėęÄ(gu©®)ĘČĪŻŻ©3Ż®▒∙č®┬Ę├µ���Ż¼ųŲäėĢrķg12s�����Ż¼ųŲäėŠÓļx133.8m���Ż¼Įø(j©®ng)▒╚ī”����Ż¼░l(f©Ī)¼F(xi©żn)Ųõ╗∙▒Š─▄ØMūŃć°╝ęųŲäėęÄ(gu©®)ĘČ�ĪŻ
ĪĪĪĪ
ė╔┤╦┐╔ęŖŻ¼į┌▓╗═¼┬Ę├µŽ┬�Ż¼Š∙┐╔īŹ¼F(xi©żn)ī”─┐ś╦╗¼ęŲ┬╩īŹ╩®ūĘ█Ö���Ż¼ī”Ąž├µĖĮų°┴”ūŅ┤¾Ž▐Č╚└¹ė├�Ż¼┐sČ╠▄ć▌vųŲäėķLČ╚���Ż¼╠ßĖ▀▄ć▌vĖ▀╦┘ąą±éųąĘĮŽ“ĘĆ(w©¦n)Č©ąį��Ż¼╠ßĖ▀ųŲäėą¦─▄�ĪŻ
ĪĪĪĪ
4.ą¦╣¹▒╚ī”Ęų╬÷
ĪĪĪĪ
Įø(j©®ng)Ę┬šµā×(y©Łu)╗»║¾�Ż¼▄ć▌vļŖ┐žÖCąĄųŲäėŽĄĮy(t©»ng)║═é„Įy(t©»ng)Ų¹▄ćųŲäėŽĄĮy(t©»ng)▒╚ī”Ęų╬÷Ż¼░l(f©Ī)¼F(xi©żn)ļŖ┐žÖCąĄųŲäėŽĄĮy(t©»ng)ā×(y©Łu)ä▌├„’@��ĪŻ
ĪĪĪĪ
4.1ĮY(ji©”)śŗ(g©░u)╝░ąį─▄
ĪĪĪĪ
é„Įy(t©»ng)▄ć▌vųŲäė┼cļŖ┐žÖCąĄ╩ĮųŲäėŽĄĮy(t©»ng)▀Mąą▒╚▌^Ą─ĮY(ji©”)╣¹╚ń▒Ē1╦∙╩Š�ĪŻ
ĪĪĪĪ
▒Ē1 é„Įy(t©»ng)Ų¹▄ćųŲäėŽĄĮy(t©»ng)╝░ļŖ┐žÖCąĄųŲäėŽĄĮy(t©»ng)▒╚ī”Ęų╬÷
ĪĪĪĪ
ĒŚ─┐ é„Įy(t©»ng)ųŲäėŽĄĮy(t©»ng) ļŖ┐žÖCąĄųŲäėŽĄĮy(t©»ng)
ĪĪĪĪ
ĮY(ji©”)śŗ(g©░u) ╣▄┬ĘÅ═(f©┤)ļs�Ż¼░▓čb▓╗▒Ń ĮY(ji©”)śŗ(g©░u)║åå╬��Ż¼╣▄┬ĘŽĄĮy(t©»ng)Ą├ĄĮā×(y©Łu)╗»
ĪĪĪĪ
čb┼õ╝░ŠSą▐ čb┼õļyČ╚Ė▀�Ż¼│╠ą“Å═(f©┤)ļs ęį─ŻēK╗»ĮY(ji©”)śŗ(g©░u)ų¦│ųŻ¼║å╗»ŠSą▐▓Į¾E�Ż¼▓čbĘĮ▒Ń
ĪĪĪĪ
▌oų· ╔┘Ż¼ČÓ×ķ╩ųäė▓┘ū„ ┐╔ūįąąį\öÓ��ĪóūįäėūRäe╣╩šŽ�Ż¼ęįļŖ┐ž░┤ŌoīŹ¼F(xi©żn)ūįäė┐ņĮ▌▓┘ū„
ĪĪĪĪ
4.2ųŲäėŠÓļx
ĪĪĪĪ
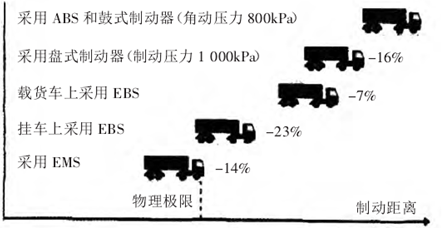
ęį▌džø▄毩╝s40tŻ®×ķ└²Ż¼┼õų├▒P╩ĮųŲäėŲ„╝░ENS����Ż¼Ģr╦┘90km/hųŲäėŻ¼ĄĮ▄ć▌v═Żų╣╬╗ų├ųŲäėŠÓļx▒╚ABS╝░╣─╩ĮųŲäėŲ„┐sČ╠╝s45%���Ż¼Č°EMBėųį┌┤╦╗∙ĄA(ch©│)╔Ž┐sČ╠Į³14%ųŲäėŠÓļx�Ż¼┐╔ęŖļŖ┐žÖCąĄųŲäėŽĄĮy(t©»ng)ā×(y©Łu)ä▌├„’@Ż©╚ńłD2Ż®�ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD2 ▓╗═¼ųŲäėčbų├Ž┬ųŲäėŠÓļx▒╚ī”Ęų╬÷
ĪĪĪĪ
5.ĮY(ji©”)╩°šZ
ĪĪĪĪ
ŠC╔Ž╦∙╩÷Ż¼▒Š╬─╩ūŽ╚ī”Ų¹▄ćļŖ┐žÖCąĄųŲäėŽĄĮy(t©»ng)▀Mąą┴╦Ę┬šµĘų╬÷���Īó┐žųŲ▓▀┬įįO(sh©©)ėŗ▄ø╝■ķ_░l(f©Ī)��Ż¼į┘š▀��Ż¼ī”ļŖ┐žÖCąĄųŲäėŽĄĮy(t©»ng)┐žųŲ─┐ś╦FENIXīŹ¼F(xi©żn)Ą─Ū░╠ߎ┬�����Ż¼ī”PID┐žųŲī”ųŲäėĄ─ė░ĒæĘų╬÷��Ż¼ūŅ║¾��Ż¼ęį▀zé„╦ŃĘ©ī”PID┐žųŲģóöĄ(sh©┤)ā×(y©Łu)╗»�Ż¼ī”─┐ś╦╗¼ęŲ┬╩Ė·█ÖŻ¼į┌æ¬(y©®ng)ė├ūŅ┤¾Ž▐Č╚Ą─┬Ę├µĖĮų°┴”╗∙ĄA(ch©│)╔Ž�Ż¼┐sČ╠▄ć▌vĖ▀╦┘ąą±éŽ┬ųŲäėŠÓļxŻ¼ęį┤╦╠ßĖ▀▄ć▌vĘĆ(w©¦n)Č©ąį���Ż¼£p╔┘░▓╚½ļ[╗╝░l(f©Ī)╔·ĪŻ
ĪĪĪĪ
ĪĪĪĪ
ģó┐╝╬─½I
ĪĪĪĪ
[1]ĻÉŅŻ. Ų¹▄ćļŖūėÖCąĄųŲäėĄ─ĻP(gu©Īn)µI╝╝ąg(sh©┤)░l(f©Ī)š╣蹊┐[J]. ā╚(n©©i)╚╝ÖC┼c┼õ╝■, 2018(1):96-97.
ĪĪĪĪ
[2]ų▄Į▄▌x. ļŖūėÖCąĄųŲäėŽĄĮy(t©»ng)蹊┐┼cįO(sh©©)ėŗ[J]. ─ŽĘĮ▐r(n©«ng)ÖC, 2018(13):168-168.
ĪĪĪĪ
[3]äóśõéź, ║┬┴┴. Ų¹▄ćšµ┐š▌oų·ųŲäėŽĄĮy(t©»ng)Ą─┐žųŲ蹊┐[J]. ųąć°╣ż│╠ÖCąĄīW(xu©”)ł¾, 2019(1):61-66.
ĪĪĪĪ
[4]┤▐Į├„. ▐I▄ćļŖ┐žųŲäėŽĄĮy(t©»ng)Ą─ĮY(ji©”)śŗ(g©░u)║═░l(f©Ī)š╣[J]. ┐Ų╝╝’L(f©źng), 2018(4):127-127.
ĪĪĪĪ
|