|
ĶF╦■ÖCŲ„╚╦Ą─¤oŠĆ▀b┐ž─ŻēKįO(sh©©)ėŗ
╦─┤©┤¾īW(xu©”)Õ\│ŪīW(xu©”)į║ÖCŲ„╚╦╣ż│╠ŽĄ ═§ę╗╩µĪĪ2020/2/8 14:15:22
ĪĪĪĪ š¬ ꬯║ļŖ┴”ĶF╦■┼╩┼└ÖCŲ„╚╦╩Ūę╗ĘNė├ė┌Öz▓ķĶF╦■╣╩šŽĄ─čbų├�����Ż¼▓╔ė├ÖCŲ„╚╦Ą─ĘĮ╩Į┐╔ęį£p╔┘╣ż╚╦Ą─ä┌äėÅŖČ╚��Ż¼▒ŻšŽ╣ż╚╦Ą─╚╦╔·░▓╚½�Ż¼╠ßĖ▀┴╦Öz£yą¦┬╩║═£╩┤_ąįĪŻė╔ė┌┼╩┼└ÖCŲ„╚╦╣żū„ĄžĘĮ╩Ūę░═Ō╣żū„��Ż¼╣żū„Łh(hu©ón)Š│▒╚▌^╠ž╩Ō�Ż¼šō╬─╠ß│÷ßśī”┼╩┼└ÖCŲ„╚╦Ą─▀b┐žĘĮ░ĖŻ¼ęį┤_▒ŻÖCŲ„╚╦š²│Ż╣żū„║═│÷¼F(xi©żn)╣╩šŽĢr��Ż¼═©▀^╚╦ÖCĮ╗╗źĄ─ĘĮ╩ĮÅ═(f©┤)įŁÖCŲ„╚╦ĀŅæB(t©żi)���ĪŻ
ĪĪĪĪ
ĻP(gu©Īn)µIį~Ż║ļŖ┴”ĶF╦■ ┼╩┼└ÖCŲ„╚╦ ▀\äė┐žųŲ ┤«┐┌═©ą┼
ĪĪĪĪ
ĪĪĪĪ
ļŖ┴”╩Ūę╗éĆć°╝ęĄ─Įø(j©®ng)Ø·äė├}���Ż¼ė╔ė┌ļŖ┴”é„▌öŽĄĮy(t©»ng)ķLŲ┌▒®┬Čį┌É║┴ėĄ─Łh(hu©ón)Š│ųą╩╣Ą├▓─┴Ž└Ž╗»��Ż¼╗“š▀ė╔ė┌ę╗ą®ūį╚╗×─(z©Īi)║”Ą─ŲŲē─�Ż¼Ģ■╩╣Ą├▌öļŖŠĆ┬Ę│÷¼F(xi©żn)╣╩šŽ����ĪŻ╚ń╣¹▀@ą®╣╩šŽø]ėą▒╗╝░ĢrÖz£y▓óą▐Å═(f©┤)Ż¼┐╔─▄Ģ■ę²Ųć└ųžĄ─║¾╣¹���ĪŻę“┤╦░▓┼┼▒žę¬Ą─ŠSūo║═ą▐Å═(f©┤)�Ż¼ī”┤_▒ŻŠĆ┬ĘĄ─░▓╚½š²│Ż▀\ąąŠ▀ėą╩«Ęųųžę¬Ą─ęŌ┴x[1]��ĪŻé„Įy(t©»ng)Ą─Öz▓ķĘĮĘ©ų„ę¬╩Ū═©▀^╣ż╚╦üĒÖz£y�ĪŻėą╚╦╣ż─┐£y║═┼╩┼└╔ŽĶF╦■Öz£yā╔ĘNĘĮ╩ĮĪŻ
ĪĪĪĪ
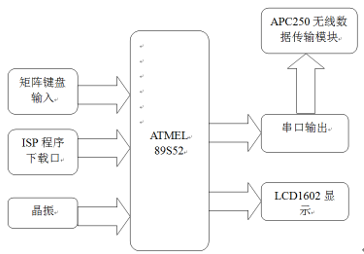
1 ┼╩┼└ÖCŲ„╚╦¤oŠĆ▀b┐ž─ŻēKįO(sh©©)ėŗ
ĪĪĪĪ
ļŖ┴”ĶF╦■┼╩┼└ÖCŲ„╚╦Ą─čąųŲ×ķ▌öļŖŠĆ┬ĘĄ─Öz£y║═ŠSą▐╠ß╣®┴╦ę╗ĘNą┬Ą─═ŠÅĮ║═└Ē─Ņ[2]���ĪŻ│²ę╗░Ń░▓čbį┌ÖCŲ„╚╦╔ŽĄ─┐žųŲŽĄĮy(t©»ng)ų«═Ō��Ż¼ąĶꬤoŠĆĄ─ĘĮ╩ĮüĒ┼cÖCŲ„╚╦═©ėŹ�����ĪŻ▒Š╬─═©▀^į┌Ąž├µ░l(f©Ī)╦═ųĖ┴Ņ���Ż¼ÖCŲ„╚╦╔ŽĄ─╔Ž╬╗ÖCŽĄĮy(t©»ng)Įė╩šųĖ┴Ņ�����Ż¼▓ó▀MąąĮŌßī║¾ī”æ¬(y©®ng)░l(f©Ī)╦═ŽÓæ¬(y©®ng)Ą─├³┴ŅĮoŽ┬╬╗ÖC��Ż¼ł╠(zh©¬)ąąŽÓæ¬(y©®ng)Ą─▓┘ū„�����ĪŻ¤oŠĆ▀b┐žĘĮ░Ė┐“łD╚ńłD1╦∙╩ŠĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD1¤oŠĆ▀b┐žĘĮ░Ė┐“łD
ĪĪĪĪ
▀b┐žŲ„ų„ꬥ─╣”─▄╩ŪÆ▀├Ķ░┤µI���Ż¼ūRäe├³┴Ņ╚╗║¾═©▀^¤oŠĆöĄ(sh©┤)ō■(j©┤)é„▌ö─ŻēK░l(f©Ī)╦═├³┴ŅĮo╔Ž╬╗ÖC����Ż¼▓óŪęĖ∙ō■(j©┤)░l(f©Ī)╦═Ą─├³┴Ņ║═Įė╩šĄĮ╔Ž╬╗ÖCĘĄ╗žĄ─├³┴ŅüĒ’@╩ŠÖCŲ„╚╦Ą─ĀŅæB(t©żi)��Ż¼ī”CPUĄ─ę¬Ū¾▓╗Ė▀��Ż¼ų╗╩Ūė╔ė┌įO(sh©©)ėŗųą╦∙ė├Ą─╩ŪŠžĻć░┤µI�����Ż¼░┤µIöĄ(sh©┤)┴┐▒╚▌^ČÓŻ¼╦∙ė├Ą─IO┐┌▌^ČÓ�Ż¼Č°Ūęę║Š¦’@╩Šę▓š╝ō■(j©┤)┴╦║▄ČÓĄ─IO┐┌ĪŻę“┤╦╦∙▀xė├Ą─┐žųŲCPUę¬Ū¾ę╗Č©Ą─IO┐┌öĄ(sh©┤)┴┐�ĪŻ
ĪĪĪĪ
2 ¤oŠĆöĄ(sh©┤)ō■(j©┤)é„▌öĘĮ╩Į
ĪĪĪĪ
▒Š┤╬įO(sh©©)ėŗĄ─¤oŠĆöĄ(sh©┤)ō■(j©┤)é„▌ö─ŻēKų„ę¬ė├ė┌▀b┐žŲ„║═ÖCŲ„╚╦ų«ķgĄ─═©ėŹŻ¼üĒ═Ļ│╔▀h│╠Ą─▀b┐žÖCŲ„╚╦Ą─▀\äė�ĪŻ▒Š┤╬įO(sh©©)ėŗų„ę¬▓╔ė├Ą─╩ŪAPC250¤oŠĆé„▌ö─ŻēK[2]ĪŻ
ĪĪĪĪ
─ŻēKĄ─╩╣ė├┐╔ęįĖ∙ō■(j©┤)ė├æ¶Ą─ąĶŪ¾üĒįO(sh©©)ų├�Ż¼ų„ę¬ėąā╔ĘNĘĮ╩ĮŻ¼ę╗╩Ū═©▀^╣½╦Š╠ß╣®Ą─▄ø╝■üĒįO(sh©©)ų├��Ż¼łDą╬Įń├µą▐Ė─ĘĮ▒Ń���Ż╗Č■╩Ūį┌ŠĆĄ─ą▐Ė─���Ż¼į┌ŠĆą▐Ė─╩Ū─ŻēKŪąōQĄĮą▌├▀─Ż╩ĮĢrŻ¼═©▀^┤«┐┌ų▒ĮėĮo─ŻēK░l(f©Ī)╦═├³┴Ņą▐Ė─�ĪŻ
ĪĪĪĪ
─ŻēK╩š░l(f©Ī)öĄ(sh©┤)ō■(j©┤)═©▀^┤«┐┌üĒīŹ¼F(xi©żn)Ż¼ę²─_ENį┌╣żū„Ą─Ģr║“æ¬(y©®ng)ų├Ą═�Ż¼ų├Ė▀Ģr×ķą▌├▀─Ż╩ĮĪŻRXD×ķ┤«┐┌Ą─▌ö╚ļ┐┌���Ż¼TXD×ķ┤«┐┌Ą─▌ö│÷┐┌����Ż¼Č╝×ķTTLļŖŲĮŻ¼┼cå╬Ų¼ÖCļŖŲĮ╝µ╚▌���ĪŻ─ŻēKĄ─TXD����ĪóRXDĘųäe┼cå╬Ų¼ÖC╗“ARMĄ─RXD����ĪóTXDŽÓĮėŻ¼AUX×ķĀŅæB(t©żi)ųĖ╩Š─_���ĪŻ
ĪĪĪĪ
3 ▀b┐žŲ„PCBļŖ┬Ę▓╝ŠĆ
ĪĪĪĪ
įō¤oŠĆ▀b┐ž─ŻēKĄ─ė▓╝■ĘĮ░ĖįO(sh©©)ėŗ╚ńłD2╦∙╩Š����Ż¼░³└©╚╦ÖCĮ╗╗źĄ─░┤µI▌ö╚ļ║═LCD’@╩Š║═öĄ(sh©┤)ō■(j©┤)Ą─¤oŠĆé„▌ö��ĪŻų„ę¬īŹ¼F(xi©żn)╣”─▄╩Ū═©▀^░┤µIĄ─▌ö╚ļ���Ż¼å╬Ų¼ÖCÖz£yūRäe░┤µI▓óī”æ¬(y©®ng)ĄĮŽÓæ¬(y©®ng)Ą─├³┴ŅŻ¼į┘═©▀^¤oŠĆöĄ(sh©┤)ō■(j©┤)─ŻēKé„╦═ĮoÖCŲ„╚╦��Ż¼ÖCŲ„╚╦Ą─Įė╩šČ╦Įė╩š├³┴ŅŻ¼į┘Ė∙ō■(j©┤)├³┴Ņł╠(zh©¬)ąąÖCŲ„╚╦Ą─▓┘ū„�ĪŻ
ĪĪĪĪ

ĪĪĪĪ
łD2 ▀b┐žŲ„PCBš²├µ
ĪĪĪĪ
4 ĮY(ji©”)šZ
ĪĪĪĪ
ļSų°ÖCŲ„╚╦╝╝ąg(sh©┤)Ą─┐ņ╦┘░l(f©Ī)š╣Ż¼×ķļŖ┴”▌öļŖŠĆ┬ĘĄ─Öz£yŠSą▐╠ß╣®┴╦ą┬═ŠÅĮ��ĪŻ═©▀^ųŲū„▒Š╬─╦∙╩÷┼╩┼└ÖCŲ„╚╦�����Ż¼öyĦÖz£yāxŲ„╚ńözė░ÖCĄ╚įO(sh©©)éõüĒ╠µ┤·╚╦╣żĄ─Öz£y����Ż¼┐╔ęį╠ßĖ▀Öz£yŠ½Č╚║═ą¦┬╩Ż¼═¼Ģrę▓£p╔┘ä┌äė┴”���Ż¼ūŅ┤¾Ž▐Č╚Ą─▒ŻšŽ┴╦╣ż╚╦Ą─░▓╚½��Ī�Ż┐╔ęį╚½├µĄ─ī”ĶF╦■▀MąąÖz£y���Ż¼░l(f©Ī)¼F(xi©żn)ĶF╦■┤µį┌Ą─ōpé¹ęį╝░░▓╚½ļ[╗╝���Ż¼╚╗║¾▀Mąą▒žę¬Ą─ŠSą▐Ż¼ī”▒ŻšŽ╬ęć°ļŖ┴”Ą─é„▌öėąų°ųžę¬Ą─ęŌ┴x[3]���ĪŻ
ĪĪĪĪ
ĪĪĪĪ
ģó┐╝╬─½I
ĪĪĪĪ
[1]└Ņ┘R.╗∙ė┌ARMĄ─ļŖ┴”ŠĆč▓ÖzÖCŲ„╚╦▀\äė┐žųŲŲ„Ą─蹊┐.[D].▒▒Š®Ż║╚A▒▒ļŖ┴”┤¾īW(xu©”)���Ż¼2008.P3~6.
ĪĪĪĪ
[2] ÅłęŃ.┴_į¬.ÓŹ┤¾ą█.ęŲäėÖCŲ„╚╦╝╝ąg(sh©┤)╝░Ųõæ¬(y©®ng)ė├[M].ļŖūė╣żśI(y©©)│÷░µ╔ń����Ż¼2007.P115~118
ĪĪĪĪ
[3] ĻÉš.▒┌├µ┼└ąąÖCŲ„╚╦įO(sh©©)ėŗ╝░┬ĘÅĮęÄ(gu©®)äØ蹊┐.[D].▀|īÄ╔“Ļ¢Ż║╔“Ļ¢╣żśI(y©©)┤¾īW(xu©”)���Ż¼2006.P54~57.
ĪĪĪĪ
|