|
╗∙ė┌─µŽ“╣ż│╠Ą─«a(ch©Żn)ŲĘ┐ņ╦┘ųŲįņ蹊┐
┘Yį┤╠ņŽ┬ĪĪ2020/5/3 11:35:46
Ż©Įė╔ŽĒōŻ®įO(sh©©)ų├łDīė�Ż¼ęį╩╣║¾├µöM║ŽĘĮ▒ŃĪŻį┌śŗ(g©░u)įņŪ·ŠĆĄ─▀^│╠ųą��Ż¼Ė∙ō■(j©┤)╬³ēmŲ„Ą─ą╬ĀŅłDīė�����Ż¼ęį╩╣║¾├µöM║ŽĘĮ▒Ń��ĪŻį┌śŗ(g©░u)įņŪ·ŠĆĄ─▀^│╠ųą���Ż¼Ė∙ō■(j©┤)╬³ēmŲ„Ą─ą╬ĀŅ║═╠žš„┤_Č©──ą®³c(di©Żn)╗“ŠĆ╩Ū┐╔ė├Ą─Ż¼──ą®³c(di©Żn)╗“ŠĆ╩Ū╝Ü(x©¼)╗»╠žš„Ą─�����Ż¼═©▀^▓Õ║═╠žš„┤_Č©──ą®³c(di©Żn)╗“ŠĆ╩Ū┐╔ė├Ą─Ż¼──ą®³c(di©Żn)╗“ŠĆ╩Ū╝Ü(x©¼)╗»╠žš„Ą─�����Ż¼═©▀^▓ÕųĄ╗“▒ŲĮ³Ą─ĘĮĘ©īóöĄ(sh©┤)ō■(j©┤)³c(di©Żn)öM║Ž│╔śėŚlŪ·ŠĆųĄ╗“▒ŲĮ³Ą─ĘĮĘ©īóöĄ(sh©┤)ō■(j©┤)³c(di©Żn)öM║Ž│╔śėŚlŪ·ŠĆ(╗“ģóöĄ(sh©┤)Ū·ŠĆ╗“ģóöĄ(sh©┤)Ū·ŠĆ)����ĪŻ
ĪĪĪĪ
į┌į┌UG NX 6.0UG NX 6.0Łh(hu©ón)Š│Ž┬Ż¼▒Š╬─ų„ę¬═©▀^Ū·ŠĆŁh(hu©ón)Š│Ž┬���Ż¼▒Š╬─ų„ę¬═©▀^Ū·ŠĆ//śėŚlŪ·ŠĆśėŚlŪ·ŠĆ//═©▀^³c(di©Żn)Ą─├³┴Ņ═©▀^³c(di©Żn)Ą─├³┴Ņ▓┘ū„ĘĮ╩Įśŗ(g©░u)įņ╬³ēmŲ„Ą─═Ōą╬Ū·ŠĆ��Ż¼▒ŻūCŪ·ŠĆ▒M┴┐║åå╬��Īó╣ŌĒś▀B└m(x©┤)Ūę¤o▓┘ū„ĘĮ╩Įśŗ(g©░u)įņ╬³ēmŲ„Ą─═Ōą╬Ū·ŠĆ�Ż¼▒ŻūCŪ·ŠĆ▒M┴┐║åå╬�Īó╣ŌĒś▀B└m(x©┤)Ūę¤o╝ŌĮŪĪóĮ╗▓µ║═ųž»B╝ŌĮŪ��ĪóĮ╗▓µ║═ųž»B[8][8]����ĪŻ×ķ╩╣║¾└m(x©┤)ūįė╔Ū·├µčėš╣║¾╚įŠ▀ėą▌^║├Ą─£╩(zh©│n)┤_ąį║═��ĪŻ×ķ╩╣║¾└m(x©┤)ūįė╔Ū·├µčėš╣║¾╚įŠ▀ėą▌^║├Ą─£╩(zh©│n)┤_ąį║═╣ŌĒśąį���Ż¼═©▀^Ė─ūā┐žųŲ³c(di©Żn)Ą─öĄ(sh©┤)─┐╣ŌĒśąįŻ¼═©▀^Ė─ūā┐žųŲ³c(di©Żn)Ą─öĄ(sh©┤)─┐üĒš{(di©żo)š¹Ū·ŠĆ����Ż¼═¼Ģr(sh©¬)▓╔ė├ų▒ŠĆöM║ŽŪ·ŠĆüĒš{(di©żo)š¹Ū·ŠĆŻ¼═¼Ģr(sh©¬)▓╔ė├ų▒ŠĆöM║ŽŪ·ŠĆā╔Č╦Ą─ĘĮĘ©üĒśŗ(g©░u)įņ╦∙ąĶŪ·ŠĆ�ĪŻā╔Č╦Ą─ĘĮĘ©üĒśŗ(g©░u)įņ╦∙ąĶŪ·ŠĆĪŻ
ĪĪĪĪ
Ū·ŠĆ▀M(j©¼n)ąą╣ŌĒś╠Ä└ĒĄ─▀^│╠┐╔ęįĘų×ķ╚²▓ĮŻ║1)īżšęē─³c(di©Żn)�Ż¼▓óą▐Ė─ē─īżšęē─³c(di©Żn)Ż¼▓óą▐Ė─ē─³c(di©Żn)Ą─ū°ś╦(bi©Īo)ųĄ�Ż╗³c(di©Żn)Ą─ū°ś╦(bi©Īo)ųĄŻ╗2)┤ų╣ŌĒś���Ż¼╩╣Ū·ŠĆ╔ŽĖ„Č╬Ą─Ū·┬╩Ę¹╠¢ę╗ų┬���Ż¼▒ŻūCŪ·ŠĆå╬═╣ąį╗“å╬░╝ąįŻ╗3)Š½╣ŌĒś�����Ż¼╩╣Ū·ŠĆ╔ŽĖ„Č╬Ą─Ū·┬╩ūā╗»Š∙ä“����Ż¼ØMūŃ╣ŌĒśŠ½╣ŌĒśŻ¼╩╣Ū·ŠĆ╔ŽĖ„Č╬Ą─Ū·┬╩ūā╗»Š∙ä“�Ż¼ØMūŃ╣ŌĒśĄ─ę¬Ū¾ĪŻ
ĪĪĪĪ
2.3.2 Ū·├µųžśŗ(g©░u)Ū·├µųžśŗ(g©░u)
ĪĪĪĪ
═Ļ│╔╬³ēmŲ„Ą─╠žš„Ū·ŠĆśŗ(g©░u)įņ║¾����Ż¼╝┤┐╔ķ_╩╝├µĄ─äō(chu©żng)Į©╝░įņą═ĪŻį┌śŗ(g©░u)įņŪ·├µĄ─▀^│╠ųą�Ż¼ĒÜī”╦∙ė├Ū·ŠĆ▀M(j©¼n)ąąŪ·┬╩Ęų╬÷Ż¼▒▄├Ōįņ│╔Ū·├µĄ─▓╗╣ŌįņŪ·├µĄ─▀^│╠ųą�Ż¼ĒÜī”╦∙ė├Ū·ŠĆ▀M(j©¼n)ąąŪ·┬╩Ęų╬÷Ż¼▒▄├Ōįņ│╔Ū·├µĄ─▓╗╣ŌĒś�����Ż╗▒M┴┐▒▄├Ō╩╣ė├Ė▀ļA┤╬Ą─Ū·├µ���Ż¼▀^Ė▀Ą─ļA┤╬▓╗āHĦüĒŪ·├µš{(di©żo)š¹Ą─└¦ĒśŻ╗▒M┴┐▒▄├Ō╩╣ė├Ė▀ļA┤╬Ą─Ū·├µ����Ż¼▀^Ė▀Ą─ļA┤╬▓╗āHĦüĒŪ·├µš{(di©żo)š¹Ą─└¦ļyŻ¼Č°Ūę║▄ļy▒ŻūCŪ·├µĄ─╣ŌĒśČ╚Ż╗▒M┴┐▒▄├Ōśŗ(g©░u)įņĘŪģóöĄ(sh©┤)╗»Ą─Ū·├µ����Ż¼ģóļyŻ¼Č°Ūę║▄ļy▒ŻūCŪ·├µĄ─╣ŌĒśČ╚��Ż╗▒M┴┐▒▄├Ōśŗ(g©░u)įņĘŪģóöĄ(sh©┤)╗»Ą─Ū·├µ�Ż¼ģóöĄ(sh©┤)öĄ(sh©┤)╗»Ą─Ū·├µĢ■ī”Ū·├µĄ─š{(di©żo)š¹Ä¦üĒśO┤¾Ą─ĘĮ▒ŃĪ��Ż╗»Ą─Ū·├µĢ■ī”Ū·├µĄ─š{(di©żo)š¹Ä¦üĒśO┤¾Ą─ĘĮ▒Ń�����ĪŻ
ĪĪĪĪ
į┌UG NX 6.0UG NX 6.0Łh(hu©ón)Š│Ž┬�Ż¼╗∙ė┌ūŅąĪČ■│╦Ū·├µöM║ŽįŁ└ĒŻ¼▒Š╬─ų„ę¬═©▀^Łh(hu©ón)Š│Ž┬����Ż¼╗∙ė┌ūŅąĪČ■│╦Ū·├µöM║ŽįŁ└ĒŻ¼▒Š╬─ų„ę¬═©▀^ŠW(w©Żng)Ė±Ū·├µŠW(w©Żng)Ė±Ū·├µ//═©▀^Ū·ŠĆĮMĄ─├³┴Ņ▓┘ū„ĘĮ╩Į���Ż¼Ęųäeī”╬³ēmŲ„Ą─Ė„éĆ(g©©)Ū·├µ▀M(j©¼n)ąą═©▀^Ū·ŠĆĮMĄ─├³┴Ņ▓┘ū„ĘĮ╩Į���Ż¼Ęųäeī”╬³ēmŲ„Ą─Ė„éĆ(g©©)Ū·├µ▀M(j©¼n)ąąöM║ŽĪŻė╔ė┌ųžśŗ(g©░u)Ą─Ū·├µŲ¼ų«ķg┐╔─▄┤µį┌ų°┴č┐p╗“╚▒╔┘Ū·├µ▀ģĮńą┼ŽóĄ╚öM║Ž�ĪŻė╔ė┌ųžśŗ(g©░u)Ą─Ū·├µŲ¼ų«ķg┐╔─▄┤µį┌ų°┴č┐p╗“╚▒╔┘Ū·├µ▀ģĮńą┼ŽóĄ╚įŁę“Ż¼╩╣Ą├▒Ē╩Š╬³ēmŲ„─Żą═Ą─Äū║╬ą┼Žó║══ž?f©┤)õą┼Žó▓╗ē“═Ļš¹��Ż¼ę“┤╦═ĻįŁę“����Ż¼╩╣Ą├▒Ē╩Š╬³ēmŲ„─Żą═Ą─Äū║╬ą┼Žó║══ž?f©┤)õą┼Žó▓╗ē“═Ļš¹Ż¼ę“┤╦═Ļ│╔Ū·├µŲ¼ųžś?g©░u)║¾ĒÜī”Ųõ▀M(j©¼n)ąą╝Ü(x©¼)▓┐╠žš„įO(sh©©)ėŗ(j©¼)����Ż¼═©▀^čė╔ņĪóŽÓĮ╗���Īó▓├╝¶�Īó│╔Ū·├µŲ¼ųžśŗ(g©░u)║¾ĒÜī”Ųõ▀M(j©¼n)ąą╝Ü(x©¼)▓┐╠žš„įO(sh©©)ėŗ(j©¼)�����Ż¼═©▀^čė╔ņ�ĪóŽÓĮ╗Īó▓├╝¶�Īó▀^Č╔ĪóĄ╣łAĄ╚Ū·├µŠÄ▌ŗ╩ųČ╬īóČÓéĆ(g©©)Ū·├µŲ¼▀Bž×│╔ę╗éĆ(g©©)š¹¾w�Ż¼Ą├ĄĮŲõŪ·▀^Č╔ĪóĄ╣łAĄ╚Ū·├µŠÄ▌ŗ╩ųČ╬īóČÓéĆ(g©©)Ū·├µŲ¼▀Bž×│╔ę╗éĆ(g©©)š¹¾wŻ¼Ą├ĄĮŲõŪ·├µ─Żą═╚ńłD├µ─Żą═╚ńłD44╦∙╩Š�ĪŻ╦∙╩ŠĪŻ
ĪĪĪĪ

ĪĪĪĪ
łD4 Ū·├µ─Żą═Ū·├µ─Żą═
ĪĪĪĪ
2.3.3 š`▓ŅĘų╬÷š`▓ŅĘų╬÷
ĪĪĪĪ
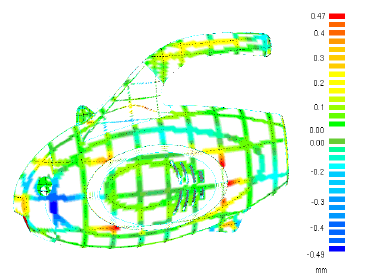
ī”╔·│╔Ą─╬³ēmŲ„Ū·├µ▀M(j©¼n)ąąš`▓ŅĘų╬÷����Ż¼ŲõīŹ(sh©¬)┘|(zh©¼)Š═╩Ūī”śŗ(g©░u)Į©Ą─Ū·├µ┼c╩Ūī”śŗ(g©░u)Į©Ą─Ū·├µ┼c³c(di©Żn)įŲöĄ(sh©┤)ō■(j©┤)▀M(j©¼n)ąąŲ½▓Ņī”▒╚Ęų╬÷Ż¼▒╚▌^ĮY(ji©”)╣¹═©▀^ė├▓╩╔½įŲłDīó▓Ņ«É’@╩Š│÷üĒŻ¼╚ńłDüĒŻ¼╚ńłD55╦∙╩Š��ĪŻ╚¶³c(di©Żn)įŲäé║├į┌Ū·├µ╔ŽŻ¼╝┤³c(di©Żn)įŲ┼cŪ·├µų«ķgø]ėąš`▓ŅŻ¼╦∙╩ŠĪŻ╚¶³c(di©Żn)įŲäé║├į┌Ū·├µ╔Ž���Ż¼╝┤³c(di©Żn)įŲ┼cŪ·├µų«ķgø]ėąš`▓ŅŻ¼ätš`▓Ņ’@╩Š×ķätš`▓Ņ’@╩Š×ķ00�ĪŻ╝┘Č©░čĪ░ĪŻ╝┘Č©░čĪ░00Ī▒┐┤│╔╩ŪšµųĄ��Ż¼ät³c(di©Żn)įŲ┼cŪ·├µĄ─š`▓Ņ┐╔ęįĪ▒┐┤│╔╩ŪšµųĄ��Ż¼ät³c(di©Żn)įŲ┼cŪ·├µĄ─š`▓Ņ┐╔ęį┐┤│╔╩Ū£y┴┐ųĄ┼cšµųĄų«▓Ņ����ĪŻė╔łD┐┤│╔╩Ū£y┴┐ųĄ┼cšµųĄų«▓ŅĪŻė╔łD55┐╔ęŖ���Ż¼╬³ēmŲ„Ą─ųžśŗ(g©░u)Ū·├µ┼c³c(di©Żn)įŲš`▓Ņ┐╔ęŖ�����Ż¼╬³ēmŲ„Ą─ųžśŗ(g©░u)Ū·├µ┼c³c(di©Żn)įŲš`▓Ņ╗∙▒Š┬õį┌Ī└╗∙▒Š┬õį┌Ī└0.2mm0.2mmĘČć·ā╚(n©©i)���Ż¼āHį┌č³▓┐═╣Ų▀^Č╔╠ÄéĆ(g©©)äe╬óąĪģ^(q©▒)ė“š`▓Ņ▀_(d©ó)ĄĮĘČć·ā╚(n©©i)Ż¼āHį┌č³▓┐═╣Ų▀^Č╔╠ÄéĆ(g©©)äe╬óąĪģ^(q©▒)ė“š`▓Ņ▀_(d©ó)ĄĮ0.47mm0.47mm��Īóč█▓┐ĖĮĮ³ę╗╠Ä▀_(d©ó)ĄĮ�����Īóč█▓┐ĖĮĮ³ę╗╠Ä▀_(d©ó)ĄĮ0.49mm0.49mm�����Ż¼╣╩āHąĶī”▀@ā╔╠ÄĄ─Ū·ŠĆ╗“Ū·├µ▀M(j©¼n)���Ż¼╣╩āHąĶī”▀@ā╔╠ÄĄ─Ū·ŠĆ╗“Ū·├µ▀M(j©¼n)ąąą▐Ė─╗“ųžą┬śŗ(g©░u)Į©���Ż¼╩╣š`▓Ņ┐žųŲį┌Ę¹║Ž─µŽ“įņą═Ą─ę╗░Ń╣½▓Ņę¬Ū¾ĘČć·ąąą▐Ė─╗“ųžą┬śŗ(g©░u)Į©Ż¼╩╣š`▓Ņ┐žųŲį┌Ę¹║Ž─µŽ“įņą═Ą─ę╗░Ń╣½▓Ņę¬Ū¾ĘČć·ā╚(n©©i)ā╚(n©©i)((Ī└Ī└0.3mm)0.3mm)�Ż¼▀@śėųžśŗ(g©░u)Ą─╬³ēmŲ„Ū·├µ─Żą═Š══Ļ╚½Ę¹�Ż¼▀@śėųžśŗ(g©░u)Ą─╬³ēmŲ„Ū·├µ─Żą═Š══Ļ╚½Ę¹║ŽĖ▀Š½Č╚║ŽĖ▀Š½Č╚NURBSNURBSŪ·Ū·├µĄ─ś╦(bi©Īo)£╩(zh©│n)�ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD5 ³c(di©Żn)įŲ┼cŪ·├µš`▓ŅĘų╬÷łD³c(di©Żn)įŲ┼cŪ·├µš`▓ŅĘų╬÷łD
ĪĪĪĪ
ė╔Ż©╬┤═ĻŻ¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|