|
“ī(q©▒)▐D(zhu©Żn)ę╗¾w╩Įų„äė╚fŽ“▌åįO(sh©©)ėŗ┼cīŹ¼F(xi©żn)
╬„▓²īW(xu©”)į║ ÖCąĄ┼cļŖÜŌ╣ż│╠īW(xu©”)į║ĪĪ╠Ų’w²ł └Ķ░▓æc Åł─╚ĪĪ2020/12/23 11:26:56
Ż©Įė╔ŽĒōŻ®

ĪĪĪĪ
łD1 “ī(q©▒)▐D(zhu©Żn)ę╗¾w╩Įų„äė╚fŽ“▌åé„äėŽĄĮy(t©»ng)łD
ĪĪĪĪ
┬ō(li©ón)▌SŲ„2×ķäéąį┬ō(li©ón)▌SŲ„�Ż¼╚ń╣¹┐šķg▓╗ūŃ�Ż¼┐╔ęį▓╔ė├ļŖÖC▌Sų▒Įė┼cąĪ²X▌å▀BĮėŻ¼┬ō(li©ón)▌SŲ„1×ķ╚ßąį┬ō(li©ón)▌SŲ„����Ż¼┐╔ęįį┌ųž▌d║═┤¾╝ė╦┘Č╚Ģr┐╔ęį▒Żūo“ī(q©▒)äėļŖÖCĪóÕF²X▌å1║═ÕF²X▌å2����Ż¼┤¾²X▌å║═Ąū▒Pų«ķg═©▀^▐D(zhu©Żn)▒P┐╔▐D(zhu©Żn)äė▀BĮėŻ¼╩╣Ą├┤¾²X▌å┐╔ęįĦų°▌åŽĄŽÓī”ė┌Ąū▒Pą²▐D(zhu©Żn)�����Ż¼▐D(zhu©Żn)Ž“ļŖÖC“ī(q©▒)äėąĪ²X▌åŻ¼ąĪ²X▌å║═┤¾²X▌åć¦║Ž“ī(q©▒)äė┤¾²X▌åŽÓī”ė┌Ąū▒Pą²▐D(zhu©Żn)�Ż¼┤¾²X▌å║═▐D(zhu©Żn)▒PųąķgŠ∙ėąłA┐ūŻ¼▌åūėĄ─ę╗▓┐Ęų┤®▀^łA┐ū┼cĄž├µĮėė|���ĪŻ
ĪĪĪĪ
2 “ī(q©▒)▐D(zhu©Żn)ę╗¾w▌åĄ─▀\äėīW(xu©”)Ęų╬÷
ĪĪĪĪ
“ī(q©▒)▐D(zhu©Żn)ę╗¾w▌åĄ─▀\äėīW(xu©”)Ęų╬÷╩Ū×ķ┴╦Ą├ĄĮ▌ö╚ļŻ©▐D(zhu©Żn)Ž“ļŖÖC║═“ī(q©▒)äėļŖÖCŻ®┼c▌ö│÷Ż©▌åūė▐D(zhu©Żn)ĮŪ║═▌åūėØLäėŻ®Ą─ĻP(gu©Īn)ŽĄ�Ż¼Ė∙ō■(j©┤)“ī(q©▒)▐D(zhu©Żn)ę╗¾w╩Įų„äė╚fŽ“▌åĄ─ā╚(n©©i)▓┐įŁ└Ē���Ż¼╚½Ž“▌åĄ─▐D(zhu©Żn)Ž“ĮŪČ╚”╚┼c┤¾²X▌å║═ąĪ²X▌åĄ─é„äė▒╚ėąĻP(gu©Īn)�Ż¼é„äė▒╚”╦Ą╚ė┌Å─äė▌å²XöĄ(sh©┤)z2┼cų„äė▌å²XöĄ(sh©┤)z1ų«▒╚���Ż¼ę╗░Ń²X▌åć¦║ŽČ╝▀xė├─ŻöĄ(sh©┤)m║═ē║┴”ĮŪaČ╝ŽÓĄ╚��Ż¼╦∙ęįé„äė▒╚”╦ę▓Ą╚ė┌Å─äė▌åĘųČ╚ų▒ÅĮd2║═ų„äė▌åĘųČ╚łAų▒ÅĮd1Ą─▒╚ųĄ��Ż¼╦∙ęį╚½Ž“▌åĄ─▐D(zhu©Żn)Ž“ĮŪČ╚”╚┼c▐D(zhu©Żn)Ž“ļŖÖCĄ─ą²▐D(zhu©Żn)ĮŪČ╚”─Ą─ĻP(gu©Īn)ŽĄ╚ń╩ĮŻ©1Ż®╦∙╩ŠŻ║
ĪĪĪĪ
Ż©1Ż®
ĪĪĪĪ
į┌ģóöĄ(sh©┤)įO(sh©©)ėŗĢr�����Ż¼┐╔ęį═©▀^║Ž└ĒĘų┼õé„äė▒╚üĒį┌ę╗Č©│╠Č╚╔Žš{(di©żo)š¹▐D(zhu©Żn)Ž“Š½Č╚��Ż¼╚ń╣¹ąĶę¬▀Ć┐╔ęį▓╔ė├Ųõ╦¹┤¾é„äė▒╚Ą─é„äėÖCśŗ(g©░u)�Ż¼╗“š▀▓╔ė├ČÓ╝ē£p╦┘ĪŻ
ĪĪĪĪ
▀\äėĢr�Ż¼“ī(q©▒)äėļŖÖC▐D(zhu©Żn)╦┘n1┼c▌åūėĄ─▐D(zhu©Żn)╦┘n2│╔▒╚└²ĻP(gu©Īn)ŽĄŻ¼▒╚└²┼cļŖÖCĄĮ▌åūėĄ─┐éé„äė▒╚”╦nėąĻP(gu©Īn)���Ż¼░³└©£p╦┘╝ē┐éé„äė▒╚”╦1║═ÕF²X▌åĄ─é„äė▒╚”╦2��ĪŻ“ī(q©▒)äėļŖÖC▐D(zhu©Żn)╦┘n1┼c▌åūėĄ─▐D(zhu©Żn)╦┘n2Ą├ĻP(gu©Īn)ŽĄ╚ń╩ĮŻ©2Ż®╦∙╩ŠŻ║
ĪĪĪĪ
Ż©2Ż®
ĪĪĪĪ
Ė∙ō■(j©┤)╩ĮŻ©1Ż®���Ż¼╚½Ž“▌å▐D(zhu©Żn)Ž“ĮŪČ╚┼c▐D(zhu©Żn)Ž“ļŖÖCĄ─▐D(zhu©Żn)Ž“ĮŪČ╚│╔▒╚└²ĻP(gu©Īn)ŽĄŻ¼▒╚└²┼cįO(sh©©)ėŗĢré„äė▒╚ėąĻP(gu©Īn)�Ż¼Ė∙ō■(j©┤)╩ĮŻ©2Ż®Ż¼▌åūė▐D(zhu©Żn)╦┘║═ĮŪ╬╗ęŲę▓┐╔ęį═©▀^╣╠Č©▒╚└²Ū¾│÷ąĶꬓī(q©▒)äėļŖÖC▐D(zhu©Żn)╦┘║═ĮŪ╬╗ęŲ����Ż¼╦∙ęįįōų„äė╚½Ž“▌å┐žųŲ║åå╬����Ż¼öĄ(sh©┤)īW(xu©”)Į©─Ż║═┐žųŲŠ∙╚▌ęūĪŻ
ĪĪĪĪ
3 ╚½Ž“▌åĄ─ĮY(ji©”)śŗ(g©░u)║═ģóöĄ(sh©┤)įO(sh©©)ėŗ
ĪĪĪĪ
3.1“ī(q©▒)▐D(zhu©Żn)ę╗¾w▌åĖ„▓┐ĘųģóöĄ(sh©┤)įO(sh©©)ėŗ
ĪĪĪĪ
ī”ė┌▐D(zhu©Żn)Ž“▓┐Ęų�Ż¼▐D(zhu©Żn)▒P┐╔ęį╩Ūą²▐D(zhu©Żn)▓═ū└╔Ž▐D(zhu©Żn)▒P┼cū└├µ▀BĮė╝■Ż¼═ŌÅĮ140mm�Ż¼ā╚(n©©i)ÅĮ90mmŻ¼┤¾²X▌åųąķgķ_Šžą╬ĮėłAĄ─┐ū�����Ż¼ŲõųąłAų▒ÅĮ90mmŠžą╬īÆČ╚50mmŻ¼ė╔ė┌┤¾²X▌åĮY(ji©”)śŗ(g©░u)╠ž╩Ō�Īó╩▄┴”ąĪĄ╚╠ž³cŻ¼═¼Ģr┐╝æ]Ą╚ą¦▐D(zhu©Żn)äėæT┴┐Ą╚å¢Ņ}����Ż¼▓╔ė├5mm╠╝└w░ÕĄ±┐╠Ż¼┤¾²X▌å─ŻöĄ(sh©┤)╚Ī2�Ż¼²XöĄ(sh©┤)z2╚Ī95²XŻ¼ĘųČ╚łAų▒ÅĮĄ╚ė┌d2Ą╚ė┌190mm�����Ż¼┤¾¾w▓Į¾E×ķCAXA└LųŲŽÓæ¬(y©®ng)Č■ŠSłD����Ż¼ī¦(d©Żo)│÷DWG╬─╝■Ż¼Ą±┐╠ÖCęÄ(gu©®)äØ┬ĘÅĮ║¾ė├2.5mmŃŖĄČ╝ė╣ż���Ż¼▀xė├ąĪ▀MĮo┴┐║═╝ė▀m┴┐ØÖ╗¼ė═▒▄├ŌöÓĄČ���ĪŻąĪ²X▌åėą│╔ŲĘõX║ŽĮ²X▌åŻ¼▀xė├²XöĄ(sh©┤)z1×ķ30���Ż¼─ŻöĄ(sh©┤)m1×ķ2�����Ż¼ĘųČ╚łAų▒ÅĮd1Ą╚ė┌60mm�Ż¼┤╦╝ēé„äė▒╚”╦╝s×ķ6.33Ż╗ī”ė┌“ī(q©▒)äė▓┐Ęų���Ż¼▌å▌×õX║ŽĮ▓─┴Ž�����Ż¼×ķ┴╦į÷┤¾ūźĄž┴”�����Ż¼▌åŠē×ķĘė╚®śõų¼▓─┴Ž�����Ż¼▌åūėų▄ķL300mmŻ¼×ķ┴╦Ą├ĄĮĖ³┤¾▐D(zhu©Żn)Šž����Ż¼“ī(q©▒)äėļŖÖC×ķ£p╦┘ļŖÖC��Ż¼═©▀^╚ßąį┬ō(li©ón)▌SŲ„┼cÕF²X▌å2ŽÓ▀B�Ż¼ė╔ė┌ąĶę¬┤¾Ą─╝ė╦┘Č╚���Ż¼ÕF²X▌å1║═ÕF²X▌å2─ŻöĄ(sh©┤)╚Ī2�����Ż¼²XöĄ(sh©┤)Š∙╚Ī15�����Ż¼²XöĄ(sh©┤)▒╚×ķ1����Ż¼▓─┴Ž×ķ╠╝õō�ĪŻ
ĪĪĪĪ
3.2“ī(q©▒)▐D(zhu©Żn)ę╗¾w▌åĄ─ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ
ĪĪĪĪ
╚ńłD2╦∙╩Š×ķ“ī(q©▒)▐D(zhu©Żn)ę╗¾w▌åĄ─ĮY(ji©”)śŗ(g©░u)─Żą═Ż¼╣╠Č©╝▄╣╠Č©į┌Ąūū∙╔Ž���Ż¼▐D(zhu©Żn)Ž“ļŖÖC╣╠Č©į┌╣╠Č©╝▄╔Ž����Ż¼╣╠Č©╝▄═©▀^CREO╚²ŠSĮ©─ŻŻ¼▓╔ė├į÷▓─ųŲįņ���Ż¼╦▄┴ŽĮzŠĆ▓─┴Ž���Ż¼╠Ņ│õ┬╩įO(sh©©)ų├60%Ż¼╠Ņ│õĮY(ji©”)śŗ(g©░u)ĘõĖCĀŅ���Ż¼ąĪ²X▌å┼c▐D(zhu©Żn)Ž“ļŖÖC▌S▀BĮė�Ż¼┤¾²X▌å║═ąĪ²X▌åć¦║Ž��Ż¼▐D(zhu©Żn)▒P═Ō╚”┼c┤¾²X▌å╣╠Č©▀BĮė��Ż¼▐D(zhu©Żn)▒P═Ō╚”┼cĄūū∙╣╠Č©▀BĮė���Ż¼▌åūė═©▀^µI▀BĮė╣╠Č©į┌“ī(q©▒)äė▌S╔Ž�Ż¼“ī(q©▒)äė▌S═©▀^▌S│ąū∙╣╠Č©į┌┤¾²X▌å╔Ž����Ż¼“ī(q©▒)äė▌Sę╗Č╦▀BĮėÕF²X▌åŻ¼ÕF²X▌åŽõ═©▀^CREO╚²ŠSĮ©─Ż����Ż¼▓╔ė├į÷▓─ųŲįņ�����Ż¼╦▄┴ŽĮzŠĆ▓─┴ŽŻ¼╠Ņ│õ┬╩įO(sh©©)ų├80%����Ż¼╠Ņ│õĮY(ji©”)śŗ(g©░u)ĘõĖCĀŅŻ¼ÕF²X▌åŽõ╣╠Č©į┌┤¾²X▌å╔Ž�Ż¼“ī(q©▒)äėļŖÖC╣╠Č©į┌ÕF²X▌åŽõ╔ŽĪŻ
ĪĪĪĪ

ĪĪĪĪ
łD2 ų„äė╚fŽ“▌å─Żą═
ĪĪĪĪ
łD3╦∙╩Š×ķ“ī(q©▒)▐D(zhu©Żn)ę╗¾w╩Įų„äė╚fŽ“▌å����Ż¼ė├ė┌╦─▌åÖCŲ„╚╦ŲĮ┼_Ż¼įōęŲäėÖCŲ„╚╦ŲĮ┼_į┌ŽÓ═¼│▀┤ń║═ųžą─Ė▀Č╚Ą─ŪķørŽ┬����Ż¼▒╚Įø(j©®ng)ĄõĄ─╚²Mecanum▌å╚½Ž“ęŲäėÖCŲ„╚╦ŲĮ┼_Š▀ėąĖ³║├Ą─ĘĆ(w©¦n)Č©ąįŻ¼Č°Ūę┼cMecanum▌åĘų▀\äė“ī(q©▒)äėŲĮ┼_▀\äė▓╗═¼��Ż¼“ī(q©▒)▐D(zhu©Żn)ę╗¾w▌åŽÓ╗źų«ķgø]ėą▓┐Ęų▀\äėŽÓ╗źĄųŽ¹����Ż¼╦∙ęį┐╔ęįėąĖ³Ė▀Ą─╝ė╦┘Č╚║═▀\ąą╦┘Č╚Ż¼ė╔ė┌▓╗ąĶę¬į┌▌åŠē╔Ž▓╝ų├ąĪ▌åūė��Ż¼╦∙ęį▌åūėĮY(ji©”)śŗ(g©░u)Ė³╝ė║åå╬Ż¼å╬éĆ▌åūė│ą▌d─▄┴”Ė³ÅŖ����Ż¼═¼Ģrė╔ė┌ČÓ┴╦ę╗éĆ▌åŻ¼žQų▒ĘĮŽ“┐éĄ─│ą▌d┴”Ė³ÅŖ����Ż¼Ė∙ō■(j©┤)Ū░╬─Ęų╬÷ę▓┐╔ęįų¬Ą└“ī(q©▒)▐D(zhu©Żn)ę╗¾w▌å┐žųŲę▓Ė³╝ė║åå╬ĪŻ
ĪĪĪĪ
ĪĪĪĪ
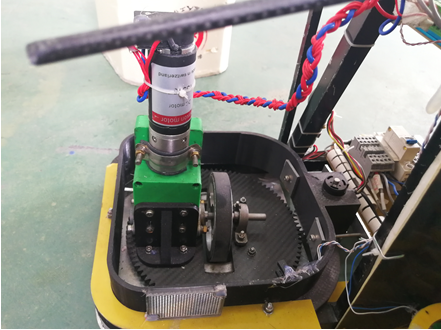
łD3 “ī(q©▒)▐D(zhu©Żn)ę╗¾wų„äė╚fŽ“▌åīŹ╬’
ĪĪĪĪ
4ĮY(ji©”)╩°šZ
ĪĪĪĪ
▒Š╬─╗∙ė┌─ŻēK╗»įO(sh©©)ėŗ╦╝Žļ��Ż¼čąŠ┐┴╦╠ßĖ▀ęŲäėÖCŲ„╚╦╚½Ž“▌åŻ©╬┤═Ļ�Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|