|
Ė─▀MŽü╚║╦ŃĘ©į┌ęŲäėÖCŲ„╚╦┬ĘÅĮęÄ(gu©®)äØųąĄ─æ¬ė├蹊┐
ČŁ╬õ▀BĪĪ2021/8/7 20:34:08
ĪĪĪĪ Ż©ĮŁ╠K╩Ī¹}│Ū╝╝ĤīWį║�����Ż¼ĮŁ╠K¹}│Ū 224001Ż®
ĪĪĪĪ
ĪĪĪĪ
š¬ę¬Ż║ęŲäėÖCŲ„╚╦ū„×ķųŪ─▄╗»░l(f©Ī)š╣Ą─ųžę¬«a╬’ų«ę╗�����Ż¼×ķ╚╦éā╠ß╣®Æ▀Ąž���Īó▓┴Ąž�����Īó▓┴┤░æ¶Ą╚Ę■äš�Ż¼╩Ū╚╦ŅÉ╔·╗ŅųąĄ─Ą├┴”Ä═╩ų�ĪŻļm╚╗┤╦ŅÉą═ÖCŲ„╚╦┐╔ęį×ķ╚╦éā╠ß╣®ČÓĘNĘ■äš��Ż¼Ą½╩Ūį┌ęŲäė┬ĘÅĮęÄ(gu©®)äØ╔Ž╔ą┤µį┌ę╗Č©╠ß╔²┐šķg���ĪŻ×ķ┴╦Ė─╔ŲÖCŲ„╚╦ęŲäė┬ĘÅĮęÄ(gu©®)äØŠ½Č╚Ż¼╝ė┐ņ┬ĘÅĮ╦č╦„╩šö┐╦┘Č╚��Ż¼▒Š╬─į┌é„Įy(t©»ng)Žü╚║╦ŃĘ©╗∙ĄA╔Ž�Ż¼▓╔ė├╬øŽüŽÓė÷ĘĮĘ©Ż¼į┌▒Ż┴¶╬øŽü▒ķÜv┬ĘÅĮėøæø─▄┴”Ą─═¼Ģr��Ż¼ī”╦ŃĘ©┬ĘÅĮ╦č╦„�����Īó┬ĘÅĮ▀xō±��Īóō]░l(f©Ī)ŽĄöĄ▀MąąĖ─▀M��ĪŻĮø▀^Ę┬šµĘų╬÷“×ūCĖ─▀M║¾���Ż¼╦ŃĘ©╩šö┐ąį─▄╝░┬ĘÅĮęÄ(gu©®)äØąį─▄Ą├ĄĮ╠ß╔²ĪŻ
ĪĪĪĪ
ĻPµIį~Ż║ęŲäėÖCŲ„╚╦��Ż╗Ė─▀MŽü╚║╦ŃĘ©����Ż╗┬ĘÅĮęÄ(gu©®)äØ
ĪĪĪĪ
ųąłDĘųŅÉ╠¢Ż║TP18;TP242 ╬─½Iś╦ųŠ┤aŻ║A
ĪĪĪĪ
ĪĪĪĪ
─┐Ū░�Ż¼æ¬ė├▒╚▌^ČÓĄ─╩ŪĖ±¢┼ś╦ūRĘĮĘ©���Ż¼įōĘĮĘ©╩ŪīóÖCŲ„╚╦Ą─╣żū„Łh(hu©ón)Š│▐D╗»×ķöĄīW─Żą═�Ż¼į┌┤╦─Żą═ųąūRäeęŲäė┬ĘÅĮ�Ż¼×ķÖCŲ„╚╦ęŲäė┬ĘÅĮĄ─ęÄ(gu©®)äØĄņČ©┴╦╗∙ĄAĪŻĻPė┌┬ĘÅĮĄ─ęÄ(gu©®)äØät╩ŪąĶę¬╩╣ė├╦ŃĘ©���Ż¼Įø▀^ėŗ╦ŃĘų╬÷��Ż¼┤_Č©ūŅā×(y©Łu)┬ĘÅĮ���ĪŻŽü╚║╦ŃĘ©┬ĘÅĮ╦č╦„║═▀x╚ĪĄ─ųžę¬╩ųČ╬Ż¼▒╗╚╦éāė├üĒķ_░l(f©Ī)ÖCŲ„╚╦ęŲäė┬ĘÅĮ┐žųŲ│╠ą“���ĪŻė╔ė┌ęį═∙ķ_░l(f©Ī)Ą─Žü╚║╦ŃĘ©į┌ÖCŲ„╚╦┬ĘÅĮęÄ(gu©®)äØųąĄ─æ¬ė├ĘĮ░Ė�Ż¼╚▒╔┘ūį▀m欚{š¹��Ż¼╦∙ęį╩šö┐╦┘Č╚Ų½ąĪ�����Ż¼▓╗└¹ė┌ūŅā×(y©Łu)ęŲäė┬ĘÅĮĄ─═┌Š“ĪŻ×ķ┴╦Åøča▀@ą®▓╗ūŃ����Ż¼▒Š╬─ī”Žü╚║╦ŃĘ©▀MąąĖ─▀MŻ¼▓ó╠ĮŠ┐Ė─▀M║¾Ą─æ¬ė├ĘĮ░Ė�����ĪŻ
ĪĪĪĪ
1 ęŲäėÖCŲ„╚╦┬ĘÅĮęÄ(gu©®)äØĄ─Ė±¢┼ś╦ūR
ĪĪĪĪ
ęŲäėÖCŲ„╚╦┬ĘÅĮęÄ(gu©®)äØå¢Ņ}Ą─蹊┐����Ż¼Ųõ║╦ą─╩Ū╚½Šų┬ĘÅĮęÄ(gu©®)äØŻ¼░┤ššŅÉäeĄ─▓╗═¼�����Ż¼┐╔ęįīó▀@éĆå¢Ņ}▓Ęų×ķā╔▓┐Ęų�Ż¼Ųõųąę╗▓┐Ęų╩ŪÖCŲ„╚╦ęŲäė╣żū„Ą─Łh(hu©ón)Š│Į©─ŻŻ¼┴Ē═Ōę╗▓┐Ęų×ķ┬ĘÅĮęÄ(gu©®)äØĘĮĘ©Ą─╠ĮŠ┐�����ĪŻĻPė┌ęŲäė╣żū„Łh(hu©ón)Š│─Żą═Ą─śŗĮ©�Ż¼ų„ę¬╩ŪīóŁh(hu©ón)Š│ĘČć·▐D╗»×ķ─▄ē“ūRäeĄ─öĄīW─Żą═�����Ż¼ęį▒ŃĖ³╝ėŠ½£╩Ą─┐žųŲęŲäė┬ĘÅĮĪŻĖ±¢┼Ę©╩Ū«öŪ░æ¬ė├▒╚▌^ČÓĄ─ę╗ĘNŁh(hu©ón)Š│Į©─ŻĘĮĘ©���Ż¼═©▀^äō(chu©żng)Į©Č■ŠSų▒ĮŪū°ś╦ŽĄ��Ż¼ŠC║ŽĘų╬÷ÖCŲ„╚╦═Ōą╬│▀┤ń�����Ī󚎥K╬’│▀┤ń�����Ż¼└LųŲ¢┼Ė±��Ż¼ą╬│╔3ĘN▓╗═¼ģ^(q©▒)ė“�ĪŻĄ┌ę╗ŅÉšŽĄK╬’Ė±¢┼�����Ż¼┤╦ģ^(q©▒)ė“▓╗┐╔ęį═©ąą���Ż╗Ą┌Č■ŅÉ░ļšŽĄK╬’Ė±¢┼���Ż¼ąĶę¬įö╝Üėŗ╦Ń���Ż¼Ą├ĄĮŠ½£╩ęŲäė┬ĘÅĮŻ╗Ą┌╚²ŅɤošŽĄKĖ±¢┼�Ż¼┐╔╣®ąą±éĪŻ
ĪĪĪĪ
ųŪ─▄ūRäeųą���Ż¼īóĄ┌ę╗ŅÉ║═Ą┌Č■ŅÉ¢┼Ė±Š∙ęĢ×ķ▓╗┐╔═©ąąģ^(q©▒)ė“��Ż¼┘xųĄ1����Ż¼Ą┌╚²ŅÉĖ±¢┼┘xųĄ0�Ż¼Å─Č°īŹ¼FÖCŲ„╚╦┬ĘÅĮęÄ(gu©®)äØĪŻį┌ś╦ūR▀^│╠ųą���Ż¼▓╔ė├ų▒ĮŪū°ś╦ŽĄĘĮĘ©���Ż¼×ķ¢┼Ė±Č©╬╗Ż¼╗“š▀▓╔ė├ą“╠¢Ę©▀Mąąś╦ūR�����ĪŻŽÓ▒╚ų«Ž┬��Ż¼║¾š▀ś╦ūRĘĮĘ©║åå╬ę╗ą®�����Ż¼▒ŠčąŠ┐▀xō±ą“╠¢ś╦ūRĘ©��Ż¼ī”¢┼Ė±▀MąąČ©╬╗�ĪŻ
ĪĪĪĪ
2 Žü╚║╦ŃĘ©Ą─įŁ└Ē╝░Ė─▀M
ĪĪĪĪ
2.1 Žü╚║╦ŃĘ©Ą─įŁ└Ē
ĪĪĪĪ
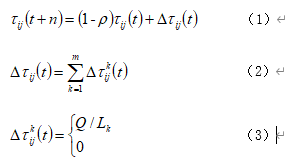
ĻPė┌┬ĘÅĮęÄ(gu©®)äØĘĮĘ©Ą─蹊┐Ż¼Į©┴óį┌─Żą═äō(chu©żng)Į©╗∙ĄA╔Ž���Ż¼ąĶę¬Įø▀^Š½£╩ėŗ╦Ń�Ż¼┤_Č©ūŅā×(y©Łu)┬ĘÅĮ���ĪŻŽü╚║╦ŃĘ©�Ż¼═©▀^─ŻöM╬øŽüąąū▀┬ĘŠĆ�Ż¼ėŗ╦ŃūŅ╝č┬ĘÅĮĪŻ═©│ŻŪķørŽ┬���Ż¼┐╔ęįīó╬øŽüąąū▀┬ĘŠĆ┐┤ū„┬├ąąå¢Ņ}���Ż¼į┌ėąą¦▒▄ķ_šŽĄK╬’Ą─Ū░╠ߎ┬���Ż¼═©▀^ėŗ╦ŃŲ³c║═ĮK³cĄ─ūŅČ╠┬ĘŠĆŻ¼┤_Č©ūŅĮKąą▀M┬ĘŠĆ���ĪŻ╝┘įO╬øŽüąąū▀ė┌i�����Ż¼jā╔éĆ│Ū╩ąų«ķg��Ż¼nų╗ļSÖC▀xō±ąąū▀┬ĘŠĆ�����Ż¼Įø▀^méĆĢr┐╠║¾���Ż¼ėŗ╦Ń├┐ę╗ų╗╬øŽüąąū▀┬ĘŠĆķLČ╚Ż¼═¼Ģr▒Ż┤µūŅČ╠┬ĘÅĮ���Ż¼īó┤╦┬ĘÅĮū„×ķūŅā×(y©Łu)┬ĘÅĮ���Ż¼▓óĖ³ą┬ą┼Žó╦ž�ĪŻŲõųą��Ż¼ą┼Žó╦žų„ę¬ė╔ā╔▓┐ĘųĮM│╔����Ż¼Ųõųąę╗▓┐Ęų×ķ╬øŽüąąū▀Ų┌ķg┴¶Ž┬Ą─ą┼Žó╦ž��Ż¼┴Ē═Ōę╗▓┐Ęų×ķ├┐ę╗Śl┬ĘÅĮō]░l(f©Ī)Ą─ą┼Žó╦ž����ĪŻ╝┘įO╦∙ėą╬øŽüąąū▀▄ē█Eą┼Žó╦ž×ķ Ż¼─Ū├┤═Ļ│╔ę╗┤╬▒ķÜv║¾�Ż¼Ė³ą┬ą┼Žó╦žĄ─ėŗ╦Ń╣½╩Į╚ńŽ┬Ż║
ĪĪĪĪ
ĪĪĪĪ
╔Ž╩÷╣½╩ĮųąŻ¼k┤·▒Ē│Ū╩ą▒ķÜv┬ĘÅĮķLČ╚���Ż╗Q┤·▒Ē╬øŽüūį╔ĒĄ─ą┼Žó╦žÅŖČ╚┤¾ą�����Ī�����Ż╗ ┤·▒Ē╬øŽüį┌ā╔éĆ│Ū╩ąų«ķg┼└ąą┬ĘÅĮ╔ŽĄ─ą┼Žó╦žØŌČ╚�����Ż╗ ┤·▒Ē▒ķÜv│Ū╩ą║¾Ą─┐é┬ĘÅĮķLČ╚���Ż╗ ┤·▒Ēą┼Žó╦ž░l(f©Ī)ō]ŽĄöĄ����ĪŻ
ĪĪĪĪ
Å─╣½╩ĮŻ©3Ż®Ą─▒Ē▀_ą╬╩Į┐╔ęį┐┤│÷�Ż¼ą┼Žó╦žØŌČ╚┤¾ąĪį┌║▄┤¾│╠Č╚╔Ž╚ĪøQė┌ā×(y©Łu)╗»│╠Č╚Ż¼▓óŪęą┼Žó╦žØŌČ╚┼c┬ĘÅĮ┤µį┌žōŽÓĻPĻPŽĄ�ĪŻ«ö▒ķÜv┬ĘÅĮ▒╚▌^Č╠Ą─ŪķørŽ┬Ż¼ą┼Žó╦žØŌČ╚öĄųĄŲ½┤¾�����ĪŻ
ĪĪĪĪ
2.2 Žü╚║╦ŃĘ©Ą─Ė─▀M
ĪĪĪĪ
2.2.1 ╗∙ė┌┬ĘÅĮ╦č╦„Ą─╦ŃĘ©Ė─▀M
ĪĪĪĪ
╦ŃĘ©ķ_åóĢr┐╠���Ż¼ą┼Žó╦ž┴┐┤¾ąĪ×ķ0��Ż¼ąĶę¬Įø▀^ę╗Č╬ĢrķgĄ─▒ķÜv║¾▓┼Ģ■▒Ē¼F│÷▓Ņ«É����ĪŻ╦∙ęį�����Ż¼╦ŃĘ©│§Ų┌ą┼Žó╦ž▓ó╬┤ŲĄĮ┼└ąą┬ĘÅĮę²ī¦ū„ė├Ż¼į┌╦č╦„┬ĘÅĮĘĮ├µ║─┘M┴╦┤¾┴┐Ģrķg��ĪŻ×ķ┴╦ÅøčaŽü╚║╦ŃĘ©į┌┬ĘÅĮ╦č╦„ĘĮ├µĄ─▓╗ūŃ�Ż¼▒Š╬─╠ß│÷╬øŽüŽÓė÷ĘĮĘ©ĪŻ▀@ĘNĘĮĘ©╩Ūīó╬øŽü▓Ęų×ķā╔ĮM��Ż¼Ųõųąę╗ĮMĘ┼ų├į┌Ų³c�Ż¼┴Ē═Ōę╗ĮMĘ┼ų├į┌ĮK³c�����Ż¼ĘųäeÅ─ā╔Ąž│÷░l(f©Ī)����Ż¼Ž“ī”ĘĮĄž³c┼└ąąŻ¼«öā╔ĮM╬øŽüį┌┬Ę═ŠųąŽÓė÷║¾���Ż¼╬øŽüĖ„ūį╗žĄĮ│§╩╝╬╗ų├��ĪŻ┼cé„Įy(t©»ng)Ą─å╬Ž“ūįė╔╦č╦„┬ĘÅĮŽÓ▒╚�Ż¼▀@ĘN┬ĘÅĮ╦č╦„ą¦┬╩Ė³Ė▀ę╗ą®�����ĪŻ╝┘įOŲ³c╬øŽü×ķ Ż¼ĮK³c╬øŽü×ķ ���Ż¼─Ū├┤ā╔ų╗╬øŽüŽÓė÷Š═┐╔ęįė├ęįŽ┬╣½╩ĮüĒ▒Ē╩ŠŻ║
ĪĪĪĪ

ĪĪĪĪ
«öØMūŃ╔Ž╩÷Śl╝■Ģr�Ż¼ā╔ų╗╬øŽüį┌═ŠÅĮŽÓė÷�Ż¼┤╦Ģrā╔ų╗╬øŽüĄ─┬ĘÅĮ┐éķLČ╚Š═╩Ū▒ķÜvā╔éĆ│Ū╩ą┬ĘÅĮĄ─┐éķLČ╚Ż¼ėø×ķŻ║  Ż©╬┤═Ļ�����Ż¼Ž┬ę╗ĒōŻ® Ż©╬┤═Ļ�����Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|