|
Ė─▀M(j©¼n)Žü╚║╦ŃĘ©į┌ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦┬ĘÅĮęÄ(gu©®)äØųąĄ─æ¬(y©®ng)ė├蹊┐
ČŁ╬õ▀BĪĪ2021/8/7 20:34:08
Ż©Įė╔ŽĒōŻ®er>
ĪĪĪĪ
╣½╩ĮŻ©5Ż®ųą�Ż¼ ┤·▒ĒŲ³c(di©Żn)╬øŽüŽÓė÷Ģr(sh©¬)┼└ąąĄ─ūŅČ╠┬ĘÅĮŻ¼ ┤·▒ĒĮK³c(di©Żn)╬øŽüŽÓė÷Ģr(sh©¬)┼└ąąĄ─ūŅČ╠┬ĘÅĮ��ĪŻ
ĪĪĪĪ
2.2.2 ╗∙ė┌┬ĘÅĮ▀xō±Ą─╦ŃĘ©Ė─▀M(j©¼n)
ĪĪĪĪ
ę└ō■(j©┤)Žü╚║╦ŃĘ©įŁ└Ē���Ż¼╬øŽüį┌┼└ąą▀^│╠ųą┬ĘÅĮĄ─▀xō±┼cą┼Žó╦žØŌČ╚┤¾ąĪ├▄ŪąŽÓĻP(gu©Īn)��Ż¼┐╔ęįīóŲõ└ĒĮŌ×ķš²Ę┤üÖC(j©®)ųŲ�����ĪŻ╚ń╣¹╬øŽüį┌┼└ąą▀^│╠ųąį┌─│Śl┬ĘÅĮųą┴¶Ž┬Ą─ą┼Žó╦ž▌^ČÓ����Ż¼ätĮėŽ┬üĒÅ─Ų³c(di©Żn)│÷░l(f©Ī)Ą─╬øŽü▀xō±┤╦┬ĘÅĮĄ─Ė┼┬╩Š═Ģ■(hu©¼)ļSų«╠ß╔²�����ĪŻÅ─└Ēšōīė├µĘų╬÷Ż¼▀@ĘN┬ĘÅĮ▀xō±ĘĮĘ©ļm╚╗─▄ē“?q©▒)Ź¼F(xi©żn)ųŪ─▄▀xō±���Ż¼Ą½╩Ūć└(y©ón)ųžŽ▐ųŲ┴╦╬øŽü┼└ąą┬ĘÅĮ����Ż¼┐sąĪ┴╦▀xō±┐šķg��Ż¼║▄ėą┐╔─▄▒▄ķ_ūŅā×(y©Łu)┼└ąą┬ĘÅĮ��ĪŻ×ķ┴╦Åøča(b©│)╦ŃĘ©į┌┬ĘÅĮ▀xō±ĘĮ├µĄ─▓╗ūŃ�Ż¼▒Š╬─╠ß│÷öU(ku©░)┤¾╦č╦„ĘČć·čąŠ┐╦╝ŽļŻ¼į┌┬ĘÅĮ▀xō±įO(sh©©)ų├ĘĮ├µ�Ż¼▓╔╚ĪČÓśėąį▓╝įO(sh©©)Ż¼╝┤└¹ė├ą┼Žó╦žĖąæ¬(y©®ng)▀M(j©¼n)ąąŽ▐Č©����ĪŻ╝┘įO(sh©©)╬øŽüī”┬ĘÅĮųąą┼Žó╦žūŅąĪĖąæ¬(y©®ng)öĄ(sh©┤)ųĄ×ķ �Ż¼«ö(d©Īng)Ż¼─│Śl┬ĘÅĮĄ─ą┼Žó╦žĄ═ė┌ Ģr(sh©¬)�Ż¼ät╬øŽüĖą╩▄▓╗ĄĮ▀@éĆ(g©©)ą┼Žó╦žŻ¼īó▀xō±Ųõ╦¹┬ĘÅĮ�ĪŻį┌┤╦ŪķørŽ┬Ż¼Ą═ą┼Žó╦žī”╬øŽü┼└ąą┬ĘŠĆĄ─ė░ĒæŠ═Ģ■(hu©¼)┤¾┤¾ĮĄĄ═����Ż¼╩╣Ą├╬øŽü▀xō±┼└ąąĄ─┬ĘÅĮĘČć·Ą├ęįöU(ku©░)┤¾���ĪŻ
ĪĪĪĪ
ļSų°╦ŃĘ©æ¬(y©®ng)ė├Ģr(sh©¬)ķgĄ─═ŲęŲŻ¼Ė„Śl┬ĘÅĮą┼Žó╦žųØuį÷╝ė��Ż¼«ö(d©Īng)ŲõĘe└█ĄĮę╗Č©│╠Č╚║¾�Ż¼Š═Ģ■(hu©¼)│÷¼F(xi©żn)┤¾ė┌ Ą─ŪķørŻ¼┤╦Ģr(sh©¬)ą┼Žó╦žķ_╩╝«a(ch©Żn)╔·┼└ąą┬ĘÅĮę²ī¦(d©Żo)ū„ė├��ĪŻ░┤šš┤╦┬ĘÅĮ▀xō±ĘĮĘ©�Ż¼┐╔ęįīó╬øŽüį┌ā╔éĆ(g©©)│Ū╩ąų«ķgĄ─┼└ąą┬ĘÅĮ▀xō±Ė┼┬╩ė├ęįŽ┬╣½╩Į▒Ē╩ŠŻ║
ĪĪĪĪ
ĪĪĪĪ
ī”ė┌╣½╩ĮŻ©6Ż®ķōųĄĘČć·ęį═ŌĄ─ŪķørŻ¼ �ĪŻ
ĪĪĪĪ
2.2.3 ╗∙ė┌ō]░l(f©Ī)ŽĄöĄ(sh©┤)š{(di©żo)╣Ø(ji©”)Ą─╦ŃĘ©Ė─▀M(j©¼n)
ĪĪĪĪ
╗∙ė┌Žü╚║╦ŃĘ©įŁ└ĒŻ¼╦ŃĘ©ąį─▄╚▌ęū╩▄ą┼Žó╦ž░l(f©Ī)ō]ŽĄöĄ(sh©┤)Ą─ė░Ēæ����Ż¼įōŽĄöĄ(sh©┤)┼c╬øŽü┼└ąą┬ĘÅĮĄ─ę²ī¦(d©Żo)┤µį┌žō(f©┤)ŽÓĻP(gu©Īn)ĻP(gu©Īn)ŽĄŻ¼╚ń╣¹ŽĄöĄ(sh©┤)öĄ(sh©┤)ųĄ▌^┤¾���Ż¼ätę²ī¦(d©Żo)╬øŽü▀xō±┼└ąą┬ĘÅĮĄ─ū„ė├Š═Ģ■(hu©¼)£p╚§�Ż¼┤¾┤¾ĮĄĄ═┴╦╬øŽü┬ĘÅĮ▀x╚ĪĄ─ųŪ─▄ū„ė├���ĪŻĘ┤ų«����Ż¼╚ń╣¹ŽĄöĄ(sh©┤)öĄ(sh©┤)ųĄ▀^ąĪŻ¼ätę²ī¦(d©Żo)┼└ąą┬ĘÅĮū„ė├╝ėÅŖ(qi©óng)�Ż¼ī¦(d©Żo)ų┬┬ĘÅĮ╦č╦„ĘČć·£pąĪĪŻ×ķ┴╦Åøča(b©│)Žü╚║╦ŃĘ©į┌░l(f©Ī)ō]ŽĄöĄ(sh©┤)ĘĮ├µĄ─▓╗ūŃ��Ż¼▒Š╬─╠ß│÷ę╗ĘNš{(di©żo)š¹ŽĄöĄ(sh©┤)Ą─ĘĮĘ©���Ż¼į┌╦ŃĘ©æ¬(y©®ng)ė├│§╩╝ļAČ╬����Ż¼▀m«ö(d©Īng)£pąĪ░l(f©Ī)ō]ŽĄöĄ(sh©┤)öĄ(sh©┤)ųĄ�����Ż¼╩╣Ą├╬øŽü┼└ąąų«ķgĄ─ę²ī¦(d©Żo)Ą├ęįŽ┬ĮĄ���Ż¼▀_(d©ó)ĄĮöU(ku©░)┤¾╦č╦„ĘČć·Ą──┐Ą─Ż¼┤╦Ģr(sh©¬)┬ĘÅĮ╦č╦„ą¦┬╩Ģ■(hu©¼)ļSų«╠ß╔²�����ĪŻ«ö(d©Īng)┬ĘÅĮ╦č╦„▀M(j©¼n)╚ļ║¾Ų┌Ģr(sh©¬)�Ż¼ųØuį÷╝ė░l(f©Ī)ō]ŽĄöĄ(sh©┤)öĄ(sh©┤)ųĄŻ¼¾w¼F(xi©żn)╚║ųŪ─▄▀xō±┬ĘÅĮąį─▄Ż¼▓╔ė├┤╦ĘĮĘ©┐ņ╦┘╩šö┐����Ż¼Å─Č°į┌Č╠Ģr(sh©¬)ķgā╚(n©©i)½@╚ĪūŅā×(y©Łu)┬ĘÅĮĪŻ░┤šš┤╦ā×(y©Łu)╗»╦╝┬Ę���Ż¼ī”░l(f©Ī)ō]ŽĄöĄ(sh©┤)▀M(j©¼n)ąąš{(di©żo)š¹�Ż¼ėŗ(j©¼)╦Ń╣½╩Į╚ńŽ┬Ż║
ĪĪĪĪ

ĪĪĪĪ
╣½╩ĮŻ©7Ż®ųą�Ż¼ ┤·▒Ē░l(f©Ī)ō]ŽĄöĄ(sh©┤)Ż¼įO(sh©©)Č©│§╩╝ųĄ×ķ1��ĪŻįōöĄ(sh©┤)ųĄļSų°╦ŃĘ©æ¬(y©®ng)ė├Ģr(sh©¬)ķgĄ─═ŲęŲ�Ż¼ŽĄöĄ(sh©┤)öĄ(sh©┤)ųĄųØu£pąĪŻ¼ūŅĮK▀_(d©ó)ĄĮūŅąĪųĄ���ĪŻ
ĪĪĪĪ
3 Ė─▀M(j©¼n)Žü╚║╦ŃĘ©į┌ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦┬ĘÅĮęÄ(gu©®)äØųąĄ─æ¬(y©®ng)ė├
ĪĪĪĪ
3.1 Ė─▀M(j©¼n)╦ŃĘ©Ą─æ¬(y©®ng)ė├
ĪĪĪĪ
īó╔Ž╩÷╠ß│÷Ą─Ė─▀M(j©¼n)Žü╚║╦ŃĘ©æ¬(y©®ng)ė├ų┴ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦ąąū▀┬ĘÅĮęÄ(gu©®)äØ«ö(d©Īng)ųą��Ż¼Š▀¾wæ¬(y©®ng)ė├┴„│╠╚ńŽ┬Ż║
ĪĪĪĪ
Ą┌ę╗▓ĮŻ║ī”╦ŃĘ©ųą╦∙ėąģóöĄ(sh©┤)▓╔╚Ī│§╩╝╗»╠Ä└Ē��ĪŻŲõųą��Ż¼│§╩╝╗»ģóöĄ(sh©┤)░³└© ą┼Žó╦žĖąæ¬(y©®ng)ķōųĄ�Īó Ų┌═¹åó░l(f©Ī)ę“╦ž�Īó ą┼Žóåó░l(f©Ī)ę“ūėĄ╚�����Ż╗Ą┌Č■▓ĮŻ║Ą╚Ę▌ĘųĖŅ╬øŽü�Ż¼īóā╔▓┐ĘųŽÓ═¼öĄ(sh©┤)┴┐Ą─╬øŽüĘųäeĘ┼ų├Ų╩╝³c(di©Żn)║═ĮK³c(di©Żn)����Ż¼ūį▀mæ¬(y©®ng)š{(di©żo)š¹░l(f©Ī)ō]ŽĄöĄ(sh©┤)Ż¼Ė∙ō■(j©┤)▓╗═¼Ūķør▀xō±┼└ąą┬ĘÅĮ���Ż¼ų▒ų┴ā╔ĮM╬øŽüį┌═ŠÅĮŽÓė÷��Ż╗Ą┌╚²▓ĮŻ║├┐ę╗┤╬▒ķÜv║¾�����Ż¼Ė³ą┬ą┼Žó╦ž�Ż╗Ą┌╦─▓ĮŻ║Įy(t©»ng)ėŗ(j©¼)«ö(d©Īng)Ū░╦Ńʩ裣h(hu©ón)┤╬öĄ(sh©┤)���Ż¼╚ń╣¹įō┤╬öĄ(sh©┤)▀_(d©ó)ĄĮ┴╦╔ŽŽ▐����Ż¼ätūŅ║¾ę╗┤╬╔·│╔Ą─ūŅČ╠┬ĘÅĮŠ═╩ŪūŅā×(y©Łu)┬ĘÅĮ�Ż¼╚ń╣¹╬┤▀_(d©ó)ĄĮ╔ŽŽ▐Ż¼ätĘĄ╗žĄ┌Č■▓Į�ĪŻ
ĪĪĪĪ
3.2 Ę┬šµĮY(ji©”)╣¹Ęų╬÷
ĪĪĪĪ
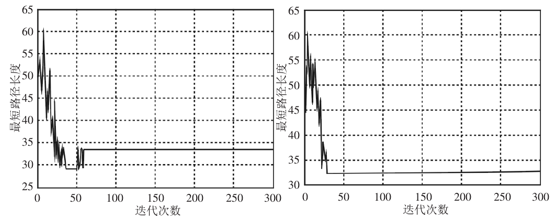
×ķ┴╦Öz“×(y©żn)▒Š╬─╠ß│÷Ą─Ė─▀M(j©¼n)╦ŃĘ©æ¬(y©®ng)ė├ĘĮ░Ė┐╔┐┐ąįŻ¼═©▀^Ę┬šµ─ŻöMĘų╬÷▀M(j©¼n)ąąÖz“×(y©żn)�����ĪŻįōĘ┬šµīŹ(sh©¬)“×(y©żn)ęįš²ĘĮą╬ģ^(q©▒)ė“┬ĘęÄ(gu©®)äØ×ķ└²����Ż¼ę¬Ū¾ÖC(j©®)Ų„╚╦Å─ū¾╔ŽĮŪęŲäė(d©░ng)ĄĮėęŽ┬ĮŪŻ¼ęŲäė(d©░ng)Ų┌ķg▒▄ķ_šŽĄK╬’�����ĪŻęįé„Įy(t©»ng)Žü╚║╦ŃĘ©ū„×ķī”ššĮM���Ż¼ęį▒Š╬─╠ß│÷Ą─Ė─▀M(j©¼n)╦ŃĘ©ū„×ķīŹ(sh©¬)“×(y©żn)ĮM�����Ż¼▓╔ė├▓╗═¼╦ŃĘ©─ŻöMÖC(j©®)Ų„╚╦ĄĮ▀_(d©ó)ųĖČ©Ąž³c(di©Żn)▒▄ķ_šŽĄK╬’Ą─ąąū▀┬ĘÅĮ�����ĪŻŲõųą�Ż¼ÖC(j©®)Ų„╚╦╣żū„Łh(hu©ón)Š│ųąĄ─Ė±¢┼┤¾ąĪ×ķŻ©20Ī┴20Ż®Ż¼ūŅ┤¾Ą³┤·┤╬öĄ(sh©┤)×ķ300���Ż¼Žü╚║ęÄ(gu©®)─Ż×ķ30�ĪŻ╚ńłD1╦∙╩Š×ķā╔ĘN╦ŃĘ©▒ķÜvŲ┌ķgūŅ┤¾Ą³┤·┤╬öĄ(sh©┤)Ę┬šµĮY(ji©”)╣¹�Ż¼łD2×ķā╔ĘN╦ŃĘ©╬øŽü┼└ąą┬ĘÅĮęÄ(gu©®)äØĮY(ji©”)╣¹ĪŻ
ĪĪĪĪ
ĪĪĪĪ
Ż©aŻ®é„Įy(t©»ng)╦ŃĘ©ūŅ┤¾Ą³┤·┤╬öĄ(sh©┤)ūā╗»Ū·ŠĆ���Ż╗Ż©bŻ®Ė─▀M(j©¼n)║¾Ą─╦ŃĘ©ūŅ┤¾Ą³┤·┤╬öĄ(sh©┤)ūā╗»Ū·ŠĆ
ĪĪĪĪ
łD1ā╔ĘN╦ŃĘ©▒ķÜvŲ┌ķgūŅ┤¾Ą³┤·┤╬öĄ(sh©┤)Ę┬šµĮY(ji©”)╣¹
ĪĪĪĪ
ūóßīŻ║┐vū°ś╦(bi©Īo)ęįĖ±¢┼ŠW(w©Żng)Ė±öĄ(sh©┤)┴┐▒Ē╩ŠūŅČ╠┬ĘÅĮķLČ╚�Ż╗ÖMū°ś╦(bi©Īo)×ķĄ³┤·┤╬öĄ(sh©┤)���Ż¼å╬╬╗Ż║┤╬�ĪŻ
ĪĪĪĪ
łD1ųą�Ż¼Ė─▀M(j©¼n)║¾Ą─╦ŃĘ©šęĄĮūŅČ╠┬ĘÅĮ║─┘M(f©©i)Ģr(sh©¬)ķgŽÓī”Č╠ę╗ą®Ż¼ūŅ┤¾Ą³┤·┤╬öĄ(sh©┤)┤¾╝s30┤╬�Ż¼Č°é„Įy(t©»ng)╦ŃĘ©Ą─ūŅ┤¾Ą³┤·┤╬öĄ(sh©┤)│¼▀^┴╦50┤╬ĪŻ╦∙ęį���Ż¼Ė─▀M(j©¼n)║¾Ą─╦ŃĘ©į┌╩šö┐╦┘Č╚ĘĮ├µŠ▀ėąę╗Č©ā×(y©Łu)ä▌�����ĪŻ
ĪĪĪĪ

ĪĪĪĪ
Ż©aŻ®é„Įy(t©»ng)╦ŃĘ©┬ĘÅĮęÄ(gu©®)äØĮY(ji©”)╣¹ Ż©bŻ®Ė─▀M(j©¼n)║¾Ą─╦ŃĘ©┬ĘÅĮęÄ(gu©®)äØĮY(ji©”)╣¹
ĪĪĪĪ
łD2ā╔ĘN╦ŃĘ©╬øŽü┼└ąą┬ĘÅĮęÄ(gu©®)Ż©╬┤═Ļ�Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|