|
│Ū╩ąĄžŽ┬ŠC║Ž╣▄└╚Č▄śŗķL┤¾Ų┬Č╚Ę└┴’▄ćæ¬╝▒┤ļ╩®
┌w├„š▄ĪĪ2022/3/19 20:08:20
Ż©Įė╔ŽĒōŻ®Š»╩Š▄ēąąģ^(q©▒)ū„śI(y©©)╚╦åT╝░Ģr▒▄ūīŻ¼░┤šš▓╗└¹▄ćør╣└╦Ń��Ż¼ł¾Š»░l(f©Ī)╔·Ģr▄ēąąģ^(q©▒)ū„śI(y©©)╚╦åTėą▓╗╔┘ė┌17├ļĄ─Ę┤ė│Ģrķg▀Mąą▒▄ūī����ĪŻ
ĪĪĪĪ

ĪĪĪĪ
łD3-2-1 ╦ĒĄ└ā╚┬Ģ╣Ōł¾Š»░▓įO
ĪĪĪĪ
3.2▄ēĄ└ūĶō§įOų├
ĪĪĪĪ
3.2.1╗∙ĄAįOų├Ż©Ū░Ų┌Ż®
ĪĪĪĪ
1��Īóį┌Č┤┐┌įOų├1-2╠Äų╣ō§čbų├Ż©Ę└ū▓Čš+ų╣ō§ŚUŻ®���Ż¼«ö╩šĄĮļŖŲ┐▄ć┴’▄ćł¾Š»ĢrŻ¼ė╔Ž┬ÆņŃ^╚╦åTŽ┬Ę┼ų╣ÖnŚU▀MąąūĶō§£p╦┘Ż©ęŖłD3-2-2Ż®��Ż╗
ĪĪĪĪ
ĪĪĪĪ
łD3-2-2 ų╣ō§ČšįOėŗłDśė
ĪĪĪĪ
2���Īóį┌▄ēĄ└ā╔▀ģ▓╝įO£p╦┘╔│┤³�����Ż¼«ö┴’▄抻ł¾░l(f©Ī)╔·Ģr����Ż¼ė╔Ž┬ÆņŃ^╗“╦ĒĄ└╣żį┌▄ē├µ▀Mąą╔│┤³ČčĘ┼���Ż╗
ĪĪĪĪ
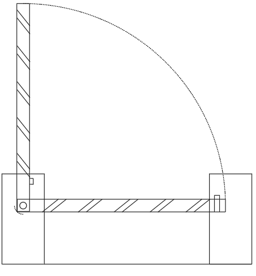
3�����Īóį┌│÷Č┤ĘĮŽ“▄ēĄ└─®Č╦╠ßŪ░ČčĘ┼╔│┤³ū„×ķų╣ō§Ż©ęŖłD3-2-3Ż®���Ż¼Č▄śŗÖC▄ć╝▄╬╗ų├ätęįĘ└ū▓┴║ū„×ķų╣ō§��ĪŻ
ĪĪĪĪ

ĪĪĪĪ
łD3-2-3 ─®Č╦Ę└ū▓╔│┤³╝░Ę└ū▓ČšŻ©¼F(xi©żn)ł÷łDŻ®
ĪĪĪĪ
╦─�ĪóĘ└┴’▄ć║¾Ų┌═Ļéõ┤ļ╩®Ż©Ą┌Č■ļAČ╬Ż®
ĪĪĪĪ
ļŖŲ┐▄ć░▓čbę╗éĆ┐žųŲų„ÖCŽĄĮy(t©»ng)▓óĦ10┤ń’@╩ŠŲ┴Ż║
ĪĪĪĪ
1�ĪóĮė╝t═Ō£y╦┘─ŻēKŻ¼£y▄ć▄ć▌vĄ─▄ć╦┘����Ż╗
ĪĪĪĪ
2ĪóĮėļŖŲ┐▄ć┐žūāŅlŲ„╗“ķ_ĻP┐žųŲ���Ż¼
ĪĪĪĪ
3ĪóĮėRFIDūx┐©Ų„ūx╚Ī╦ĒĄ└čž═ŠĄ─RFID┐©����Ż¼ūRäe▄ć▌vį┌╦ĒĄ└ųąĄ─╬╗ų├Ż╗
ĪĪĪĪ
4�����ĪóĮė▄ćŅ^▄ć╬▓Ą─Ėąæ¬Ų„�����Ż¼Ėąæ¬╦ĒĄ└ā╔Č╦Ą─═Ż┐©╬╗���Ż╗ūįäėųŲäė═Ż▄ć�����Ż╗
ĪĪĪĪ
5�ĪóĮė▄ćŅ^▄ć╬▓Ą─Ę└▒¼özŽ±Ņ^��Ż¼▓ķ┐┤▄ćŅ^▄ć╬▓Ą─īŹĢręĢŅl���Ż╗
ĪĪĪĪ
6��ĪóĮė▄ćŅ^▄ć╬▓Ą─╝ż╣Ōé„ĖąŲ„��Ż¼Öz£y▄ć▌vš²Ū░ĘĮĄ─šŽĄK╬’��ĪŻ
ĪĪĪĪ
4.1ļŖŲ┐▄ć£y╦┘
ĪĪĪĪ
ļŖŲ┐▄ć░▓čb╝t═Ō£y╦┘─ŻēK�Ż¼īŹĢr╔Žł¾▄ć╦┘ĮoļŖŲ┐▄ć┐žųŲų„ÖC��ĪŻ
ĪĪĪĪ
4.2ļŖŲ┐▄ćūįäėųŲäė
ĪĪĪĪ
ļŖŲ┐▄ć┐žųŲų„ÖC═©▀^Įė╩š╝t═Ō£y£y╦┘─ŻēKĄ─╦┘Č╚��Ż¼╚ń╣¹│¼▀^ŅAįO╦┘Č╚Ż¼╝┤ūįäė┐žųŲļŖŲ┐▄ćūāŅlŲ„╗“ķ_ĻPüĒ┐žųŲļŖŲ┐▄ćĄ─▄ć╦┘╗“═Ż▄ć����ĪŻ
ĪĪĪĪ
4.3ļŖŲ┐▄ć╬╗ų├Č©╬╗
ĪĪĪĪ
ļŖŲ┐▄ć╔Ž░▓čbRFIDūx┐©Ų„Ż¼į┌╦ĒĄ└čž═Š░▓čbRFID┐©Ų¼�Ż¼RFIDūx┐©īŹĢrūxĄĮčž═ŠĄ─RFID┐©Ż¼īŹĢr┴╦ĮŌļŖŲ┐▄ćĄ─╬╗ų├�����Ż¼ūŅĮK┐╔ęįīŹ¼F(xi©żn)į┌╦ĒĄ└ųąĄ─ŲĮ├µ╗“3DłDųą’@╩ŠļŖŲ┐▄ćĄ─īŹĢr╬╗ų├�ĪŻ
ĪĪĪĪ
4.4ļŖŲ┐▄ćĄ─ŲĮK³cūįäė═Ż▄ć╝░Ų┬Č╚╬╗ų├ūįäėŽ▐╦┘
ĪĪĪĪ
ļŖŲ┐▄ć╔ŽĄ─▄ćŅ^▄ć╬▓╬╗ų├░▓čbĮėė|╩ĮĖąæ¬Ų„Ż¼į┌╦ĒĄ└Ą─Ų³c╗“ĮK³c░▓čbī”æ¬Ą─Ėąæ¬╬╗ų├����Ż¼«öļŖŲ┐▄ćĄĮ▀_ŲĮK³c╬╗ų├Ż¼ūįäė═Ż▄ć�����ĪŻį┌čž═ŠųąėąŲ┬Č╚Ą─╬╗ų├ūįäėÖz£y▄ć╦┘╝░┐žųŲļŖŲ┐▄ćūāŅlŲ„Ž▐ųŲ┐žųŲ▄ć╦┘����ĪŻ
ĪĪĪĪ
4.5ļŖŲ┐▄ćĄ─▄ćŅ^▄ć╬▓ęĢŅl▓ķ┐┤
ĪĪĪĪ
ļŖŲ┐▄ć╔ŽĄ─┐žųŲų„ÖC═©▀^ŠWĮjĮė╚ļ▄ćŅ^özŽ±Ņ^�Ż¼═©▀^¤oŠĆĘĮ╩ĮĮė╚ļ▄ć╬▓özŽ±Ņ^Ż¼īŹ¼F(xi©żn)īŹĢr▓ķ┐┤▄ćŅ^▄ć╬▓Ą─īŹĢręĢŅl����ĪŻ
ĪĪĪĪ
4.6ļŖŲ┐▄ćĄ─▄ćŅ^šŽĄK╬’Öz£y
ĪĪĪĪ
ļŖŲ┐▄ć╔ŽĄ─┐žųŲų„ÖC═©▀^ėąŠĆĮė╚ļ╝ż╣Ō└ū▀_Öz£yšŽĄK╬’���Ż¼═©▀^¤oŠĆĘĮ╩ĮĮė╚ļ▄ć╬▓╝ż╣Ō└ū▀_Ż¼īŹ¼F(xi©żn)▄ćŅ^▄ć╬▓ėąšŽĄK╬’ūįäė═Ż▄ć�����ĪŻ
ĪĪĪĪ
4.8Ę└┴’▄ćčbų├ķ_åó╝░└«░╔
ĪĪĪĪ
░▓čbį┌╦ĒĄ└Ą─Ę└┴’▄ćčbų├��Ż╗«öļŖŲ┐▄ć┐žųŲų„ÖC═©▀^Öz£y▄ć╦┘�����Ż¼░l(f©Ī)¼F(xi©żn)▄ć▌v▀^┐ņĢrŻ¼═©▀^¤oŠĆą┼╠¢░l(f©Ī)ą┼╠¢åóäėĘ└┴’▄ćčbų├Ą─ķ_ĻP�Ż╗╝░└«░╔ÅV▓ź═©ų¬���ĪŻ
ĪĪĪĪ
4.9ļŖŲ┐▄ć▄ēĄ└Šo╝▒▒¦╦└čbų├
ĪĪĪĪ
įOėŗĖ─įņļŖŲ┐▄ć�Ż¼į┌Šo╝▒ŪķørŽ┬Ż¼åóäė▄ēĄ└▒¦╦└čbų├╩╣ļŖŲ┐▄ćŠoŠoŖAūĪ▄ēĄ└���Ż¼▀MąąŠo╝▒ųŲäė�����ĪŻ
ĪĪĪĪ
4.10ą┼Žó╗ź┬ō(li©ón)╗ź═©
ĪĪĪĪ
ū„śI(y©©)ģ^(q©▒)ė“ŠWĮj╚½Ė▓╔w����Ż¼īŹ¼F(xi©żn)▒O(ji©Īn)┐ž╩ę�����ĪóČ▄śŗ▓┘ū„╩ę�ĪóÖC▄ć╦ŠÖC╩ęĄ─ą┼Žóé„▀f╗ź┬ō(li©ón)╗ź═©Ż¼╠ßĖ▀╦«ŲĮ▀\▌ö┼cČ▄śŗŠ“▀MĄ─╣żą“ŃĢĮėą¦┬╩┼c┬ō(li©ón)äėąį����Ż¼į÷ÅŖ╣▄└ĒųĖ┴ŅĄ─┬õīŹ┴”Č╚ĪŻ
ĪĪĪĪ
4.11╣▄└ĒųŲČ╚┬õīŹ���ĪóĖ·█ÖĄ─ą┼Žó╗»
ĪĪĪĪ
ū„śI(y©©)ģ^(q©▒)ė“ŠWĮj╚½Ė▓╔wŻ¼└¹ė├╦«ŲĮ▀\▌öļŖŲ┐▄ć░▓╚½▒O(ji©Īn)£yą┼Žó╗»ŲĮ┼_Ż©╔ą╬┤┤ŅįOŻ®���Ż¼ī”ÖC▄ćąą▀M�����Īó▓┘ū„�ĪóŠS▒Ż�����Īóč▓▓ķĀŅæB(t©żi)▀Mąą╚½ĘĮ╬╗▒O(ji©Īn)┐ž�����Ż¼╝µ╚▌webČ╦┼cęŲäėįOéõ�Ż¼į┌ŠĆīŹ¼F(xi©żn)äėæB(t©żi)▒O(ji©Īn)┐žĪó╚½åT╣▄└Ē�����Īóę╗µIŠ»╩ŠĄ╚╣”─▄����ĪŻ
ĪĪĪĪ
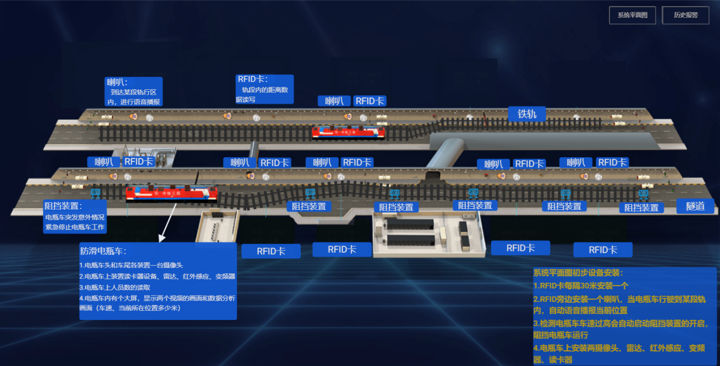
4.12▄ēĄ└ļŖäėŲĮ┼_░▓╚½▒O(ji©Īn)╣▄ŲĮ├µłD│§▓ĮįOŽļ
ĪĪĪĪ
ĪĪĪĪ
łD4-1-1 ░▓╚½▒O(ji©Īn)╣▄│§▓ĮįOŽļłD
ĪĪĪĪ
╬Õ�����Īó║¾└m(x©┤)╩®╣żįOŽļ╝░š╣═¹
ĪĪĪĪ
«öŪ░ųŪ─▄ÖCŲ„╚╦Īó╚╦╣żųŪ─▄��Īó┤¾öĄ(sh©┤)ō■(j©┤)���Īó│¼╝ēėŗ╦ŃÖCĄ╚╝╝ągĘĮ┼d╬┤░¼Ż¼ę└═ąė┌┐Ų╝╝Ą─▀M▓Į���Ż¼╩®╣ż╣żą“ŽÓī”å╬ę╗Ą─Č▄śŗ╩®╣żīóųØu▀M╚ļ¤o╚╦╗»Ą─Ģr┤·�����ĪŻČ▄śŗ╣▄Ų¼Ų┤čb┐╔ļSų°Č▄╬▓ķgŽČ£y┴┐ŽĄĮy(t©»ng)Ą─ųØu│╔╩ņų▓ĮīŹ¼F(xi©żn)╣▄Ų¼ūįäė▀xą═ĪóūįäėŲ┤čb╣żū„Ż╗ļŖŲ┐▄ć�ĪóķTĄ§Ą╚▓┘ū„ęÓ┐╔ļSų°ą┼Žó╝╝ąg���Īóé„Ėą╝╝ągĄ─▀M▓ĮųØuīŹ¼F(xi©żn)¤o╚╦▓┘ū„�����Ż╗Č▄śŗÖCĄ─ūįäė±{±éų„ę¬╩▄Ž▐ė┌Ąž┘|Łh(hu©ón)Š│Ą─Å═ļsąį�����Ż¼Ą½ļSų°Č▄śŗŠ“▀MģóöĄ(sh©┤)Ą╚ŽÓĻPą┼ŽóĄ─╩š╝»��Ż¼└¹ė├┤¾öĄ(sh©┤)Ż©╬┤═Ļ����Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|