|
ūįäėš{(di©żo)ŲĮŲĮ┼_ĮY(ji©”)śŗ(g©░u)╝░┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ蹊┐
ģŪąĪĘ╝ äóąĪ├„ĪĪ2022/5/23 19:19:32
ĪĪĪĪ Ż©ĮŁ╠K╩ĪĄżĻ¢ųąĄ╚īŻśI(y©©)īW(xu©”)ąŻ��Ż¼ĮŁ╠K µé(zh©©n)ĮŁ 212300Ż®
ĪĪĪĪ
š¬ ꬯║×ķ┴╦Ė─╔Ųūįäėš{(di©żo)ŲĮ╝╝ąg(sh©┤)ąį─▄�Ż¼▒Š╬─ęįŲĮ┼_ĮY(ji©”)śŗ(g©░u)ū„×ķĖ─▀M(j©¼n)═╗ŲŲ┐┌Ż¼╠ß│÷ą┬Ą─ŲĮ┼_ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗĘĮ░Ė�ĪŻęįÅŖ╗»ų¦ō╬×ķ─┐Ą─Ż¼ĮY(ji©”)║ŽŲĮ┼_š{(di©żo)ŲĮ┐žųŲąĶŪ¾����Ż¼įO(sh©©)ėŗ┐žųŲŽĄĮy(t©»ng)┐é¾w╝▄śŗ(g©░u)ĪŻ═©▀^å╬¬Üėŗ╦ŃĖ„éĆļŖŚUĄ─┐žųŲĮŪČ╚��Ż¼Ž┬▀_(d©ó)┐žųŲū„śI(y©©)├³┴Ņ����ĪŻ£yįćĮY(ji©”)╣¹▒Ē├„Ż¼▒Š┐žųŲŽĄĮy(t©»ng)─▄ē“▌^×ķ£╩(zh©│n)┤_Ąžš{(di©żo)ŲĮŲĮ┼_�Ż¼┐╔ęįū„×ķŲĮ┼_ūįäėš{(di©żo)ŲĮ┐žųŲįO(sh©©)ėŗģó┐╝ę└ō■(j©┤)ĪŻ
ĪĪĪĪ
ĻP(gu©Īn)µIį~Ż║┐žųŲŽĄĮy(t©»ng)����Ż╗ūįäėš{(di©żo)ŲĮŲĮ┼_Ż╗å╬Ų¼ÖC(j©®)
ĪĪĪĪ
Research on structure and control system design of automatic leveling platform
ĪĪĪĪ
Wu Xiaofang Liu Xiaoming
ĪĪĪĪ
(Jiangsu Danyang secondary vocational school, Zhenjiang, Jiangsu, 212300)
ĪĪĪĪ
Abstract: in order to improve the performance of automatic leveling technology, this paper takes the platform structure as the improvement breakthrough, and puts forward a new platform structure design scheme. In order to strengthen the support, combined with the platform leveling control requirements, the overall architecture of the control system is designed. The control angle of each electric pole is calculated separately to issue the control operation command. The test results show that the control system can level the platform accurately and can be used as a reference for the design of automatic leveling control of the platform.
ĪĪĪĪ
Key words: control system; Automatic leveling platform; singlechip
ĪĪĪĪ
ĪĪĪĪ
Į³─ĻüĒ��Ż¼ūįäė╗»š{(di©żo)ŲĮ╝╝ąg(sh©┤)Ą─æ¬(y©®ng)ė├ŅI(l©½ng)ė“ųØuöU(ku©░)┤¾�Ż¼│╔×ķ┴╦Ė„ŅÉįO(sh©©)éõĘĆ(w©¦n)Č©▀\ąąĄ─ųžę¬┐žųŲ╝╝ąg(sh©┤)[1]��ĪŻ═©▀^ķ_░l(f©Ī)ūįäėš{(di©żo)ŲĮ┐žųŲŽĄĮy(t©»ng)��Ż¼ėąų·ė┌ĮĄĄ═įO(sh©©)éõ┐žųŲ│╠ą“Ą─Å═(f©┤)ļs│╠Č╚���Ż¼▓óŪę┐╔ęįį┌ę╗Č©│╠Č╚╔ŽĮĄĄ═įO(sh©©)éõĄ─▓┘ū„╝╝ąg(sh©┤)╦«ŲĮ��Ż¼ī”ŹÅ╬╗╝╝ąg(sh©┤)╚╦åTĄ─▓┘ū„─▄┴”ėą╦∙ĮĄĄ═[2]ĪŻ×ķ┴╦į÷╝ė┤╦ĘĮ├µĄ─┐Ųčą│╔╣¹��Ż¼╬ęć°ćLįćķ_░l(f©Ī)ę╗ĘNūįäėš{(di©żo)ŲĮŽĄĮy(t©»ng)����Ż¼└¹ė├š{(di©żo)ŲĮŲĮ┼_��Ż¼ī”įO(sh©©)éõū„śI(y©©)ĀŅæB(t©żi)╝ėęįš{(di©żo)ŲĮ┐žųŲ��ĪŻ─┐Ū░�����Ż¼įō蹊┐ĒŚ─┐╚į╚╗═Ż┴¶į┌蹊┐ļAČ╬���Ż¼╔ą╬┤ą╬│╔═Ļš¹Ą─ŽĄĮy(t©»ng)įO(sh©©)ėŗĘĮ░ĖŻ¼▒Š╬─ćLįćÅ─ūįäėš{(di©żo)ŲĮŲĮ┼_Ą─ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)╝░ū„śI(y©©)įŁ└Ē│÷░l(f©Ī)���Ż¼╠ß│÷ą┬Ą─š{(di©żo)ŲĮ┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ蹊┐�����ĪŻ
ĪĪĪĪ
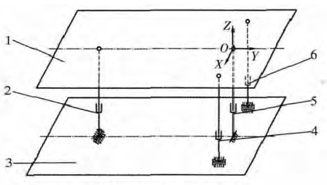
1 ūįäėš{(di©żo)ŲĮŲĮ┼_ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)╝░ū„śI(y©©)įŁ└Ē
ĪĪĪĪ
ūįäėš{(di©żo)ŲĮŲĮ┼_ųą║¼ėą3ĘNų¦ō╬─Ż╩ĮŻ¼├┐ĘNų¦ō╬─Ż╩ĮĄ─ų¦ō╬³cöĄ(sh©┤)┴┐▓╗═¼[3]�����ĪŻ─┐Ū░�����Ż¼ęčĮø(j©®ng)ķ_░l(f©Ī)Ą─▀@3ĘNų¦ō╬─Ż╩ĮĖ„ūį┤µį┌╚▒³c����Ż¼ų„ę¬¾w¼F(xi©żn)į┌┐╣āAĖ▓─▄┴”▒Ī╚§ĪóŲĮ┼_é╚(c©©)ĘŁ┐╔─▄ąį▌^┤¾����ĪóÄū║╬å¢Ņ}▌^┤¾��ĪóĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗėŗ╦Ń┴┐▌^┤¾4éĆĘĮ├µ���ĪŻ×ķ┴╦Åøča▀@ą®įO(sh©©)ėŗĘĮ░ĖĄ─▓╗ūŃ����Ż¼▒Š╬─╠ß│÷ę╗ĘNą┬Ą─ūįäėš{(di©żo)ŲĮŲĮ┼_ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗĘĮ░Ė����Ż¼╚ńłD1╦∙╩ŠĪŻ
ĪĪĪĪ
ĪĪĪĪ
1-╔ŽŲĮ┼_��Ż╗2-ļŖŚUI�����Ż╗3-Ž┬ŲĮ┼_����Ż╗4-ļŖŚUII�Ż╗5-╠ō╣╠Č©ŚU�����Ż╗6-ļŖŚUIII
ĪĪĪĪ
łD1 ūįäėš{(di©żo)ŲĮŲĮ┼_ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)
ĪĪĪĪ
įōŲĮ┼_═©▀^┤“įņ╔ŽŲĮ├µ���Ż¼▀_(d©ó)ĄĮ╠ßĖ▀ĮY(ji©”)śŗ(g©░u)ĘĆ(w©¦n)Č©ąįĄ──┐Ą─����ĪŻ└¹ė├4éĆŪ“Ńqū„×ķų¦ō╬³c���Ż¼į┌▓╗═¼łDųą▓╗═¼╬╗ų├▓╝įO(sh©©)Ż¼īó╝▄śŗ(g©░u)ų¦ō╬ŲüĒ��ĪŻ▓╔ė├ęŲäėĖ▒ĘĮ╩Į��Ż¼īóŽ┬ŲĮ┼_┼c╠ō╣╠Č©ŚU▀BĮėĄĮę╗Ų����Ż¼═¼ĢrĮĶų·Ńqµ£�Ż¼īóŽ┬ŲĮ┼_Īó╠ō╣╠Č©ŚU���ĪóļŖŚUIIIĪóļŖŚUIIŻ©ļŖäė═ŲŚUŻ®▀BĮėĄĮę╗Ų�����Ż¼Č©┴x×ķX▌SĪŻ╠ō╣╠Č©ŚU┼cļŖŚUIĄ─▀BĮėųąŠĆ�����Ż¼į┌▒ŠĮY(ji©”)śŗ(g©░u)ųąČ©┴x×ķY▌S�Ż¼įō▀BĮėŠĆ┬Ę┼cŽ┬ŲĮ┼_Ą─▀BĮė���Ż¼ĮĶų·Ńqµ£═Ļ│╔▀BĮė����ĪŻ▒ŠĮY(ji©”)śŗ(g©░u)ųąĄ─įŁ³cČ©┴x×ķX▌S┼cY▌SĄ─Į╗³c��Ż¼ūįäėš{(di©żo)ŲĮŲĮ┼_Ą─ūįė╔Č╚įO(sh©©)ų├×ķ3��ĪŻ
ĪĪĪĪ
įōŲĮ┼_▀\ė├3éĆļŖŚUīŹ¼F(xi©żn)ūįäėš{(di©żo)ŲĮ�Ż¼«ö(d©Īng)ŲõŠ∙čžų°ŽÓ═¼Ą─ĘĮŽ“▀\äėĢr����Ż¼ęį╔ŽŲĮ┼_ū„×ķš{(di©żo)╣Ø(ji©”)ī”Ž¾��Ż¼═©▀^į÷╝ėįōŲĮ┼_Ą─Ė▀Č╚�����Ż¼═Ļ│╔ūįäėš{(di©żo)ŲĮ����ĪŻŲõųąŻ¼╔ŽŲĮ┼_š{(di©żo)╣Ø(ji©”)Ė▀Č╚Š═╩ŪZ▌SĘĮŽ“?q©▒)”æ?y©®ng)Ą─Ė▀Č╚���ĪŻęįX▌S×ķųąą─▀M(j©¼n)ąąą²▐D(zhu©Żn)Ģr�Ż¼═©▀^Ė®č÷š{(di©żo)ŲĮū„śI(y©©)Ż¼═¼Ģrš{(di©żo)Ż©╬┤═Ļ�Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪĖĮ╝■Ž┬▌dŻ║ūįäėš{(di©żo)ŲĮŲĮ┼_ĮY(ji©”)śŗ(g©░u)╝░┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ蹊┐
|