|
ę╗ĘN─▄ūįäė(d©░ng)┼┼└KĄ─ĄVŠ«Š╚į«Įg▄ćįO(sh©©)ėŗ(j©¼)╝░╣”─▄īŹ(sh©¬)¼F(xi©żn)
┐Ŗ▌xŪ┘ĪĪ2022/5/24 8:33:58
Ż©Įė╔ŽĒōŻ®r>ĪĪĪĪ
ūįäė(d©░ng)┼┼└K╣”─▄╩Ū▒ŠĮg▄ć┐žųŲčbų├Ą─ųžę¬╣”─▄Ż¼└¹ė├ļpŽ“┬▌ŚU���Ż¼čžų°ų¦╝▄▌SŽ“═∙Å═(f©┤)▀\(y©┤n)äė(d©░ng)����Ż¼Å─Č°═Ļ│╔ūįäė(d©░ng)┼┼└K▓┘ū„��ĪŻ×ķ┴╦▒ŻūC┼┼└Kū„śI(y©©)Ą─ĘĆ(w©¦n)Č©ąį�Ż¼▒Ščbų├į┌ļpŽ“┬▌ŚU╔Ž░▓čb┴╦╗¼ēK����ĪŻ┼┼└Kū„śI(y©©)Ų┌ķgŻ¼╩▄╗¼ēKŽ▐ųŲ����Ż¼┬▌ą²▓█╣╠Č©▓╗äė(d©░ng)ĪŻį┌īŹ(sh©¬)ļHæ¬(y©®ng)ė├ųą���Ż¼┐╔ęį═©▀^š{(di©żo)╣Ø(ji©”)┬▌ą²╔²ĮŪ���Ż¼īó▌SŽ“ē║┴”Ęų┴┐╩®╝ėį┌╗¼ēK╔Ž�����Ż¼Å─Č°īŹ(sh©¬)¼F(xi©żn)╗¼ēKĄ─ņ`╗Ņ┐žųŲ��ĪŻ«ö(d©Īng)┬▌ą²▓█Č╦Öz£y(c©©)ĄĮ╗¼ēK▀\(y©┤n)äė(d©░ng)ĄĮ┤╦╠ÄĢr(sh©¬)�����Ż¼Ė─ūā┬▌ą²ĘĮŽ“���Ż¼┤╦ĒŚ(xi©żng)▓┘ū„Š▀ėą═¼Ģr(sh©¬)Ė─Ž“ū„ė├Ż¼╝┤╗¼ēKĄ─▌SŽ“ū„śI(y©©)ĘĮŽ“ę▓īóĖ─ūā�����ĪŻ░┤šš▀@ĘN┐žųŲĘĮ╩Į�����Ż¼┴ŅļpŽ“┬▌ŚU═∙Å═(f©┤)▀\(y©┤n)äė(d©░ng)�Ż¼▀\(y©┤n)äė(d©░ng)Ų┌ķgõōĮz└K┼┼╚ļĄVŠ«��Ż¼ęįä“╦┘ū„śI(y©©)����ĪŻ
ĪĪĪĪ
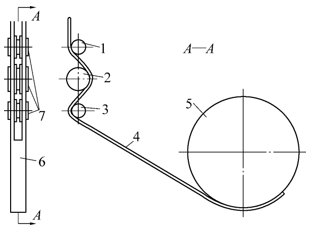
ĻP(gu©Īn)ė┌ūįäė(d©░ng)┼┼└K╣”─▄Ą─įO(sh©©)ėŗ(j©¼)���Ż¼ĮĶų·µ£Ślµ£▌åū„ė├�Ż¼ī”(du©¼)ļp┬▌ą²é„äė(d©░ng)ÖC(j©®)śŗ(g©░u)▓╔╚ĪĘųäė(d©░ng)┐žųŲ����ĪŻį┌┤╦Ų┌ķgŻ¼ąĪµ£▌åį┌ŠĒ═▓ū„śI(y©©)Ħäė(d©░ng)Ž┬«a(ch©Żn)╔·ę╗Č©▐D(zhu©Żn)╦┘���Ż¼ęįµ£Ślū„×ķé„äė(d©░ng)├ĮĮķ����Ż¼īó┤╦▓┐Ęų▐D(zhu©Żn)╦┘“ī(q©▒)äė(d©░ng)ū„ė├į┌┤¾µ£▌å╔Ž�����Ż¼Å─ȰĦäė(d©░ng)┤¾µ£▌åū„śI(y©©)��ĪŻČ°║¾ļpŽ“┬▌ŚUį┌┤¾µ£▌åĄ─Ħäė(d©░ng)Ž┬ķ_╩╝ū„śI(y©©)���Ż¼┼┼└K▌åį┌┤╦┐žųŲŽ┬═∙Å═(f©┤)▀\(y©┤n)äė(d©░ng)�Ż¼Å─Č°īŹ(sh©¬)¼F(xi©żn)ūįäė(d©░ng)┼┼└K┐žųŲ╣”─▄���ĪŻ╚ńłD2╦∙╩Š×ķ┼┼└K▌åĮY(ji©”)śŗ(g©░u)╝░└@└K╩ŠęŌłD����ĪŻ
ĪĪĪĪ
ĪĪĪĪ
└^└m(x©┤)
ĪĪĪĪ
1-┼┼└K▌åŻ©ŠÄ╠¢(h©żo)×ķ1Ż®�Ż╗2-┼┼└K▌åŻ©ŠÄ╠¢(h©żo)×ķ2Ż®Ż╗3-┼┼└K▌åŻ©ŠÄ╠¢(h©żo)×ķ3Ż®�����Ż╗4-õōĮz└K��Ż╗
ĪĪĪĪ
5-ŠĒ═▓═▓Üż���Ż╗6-┼┼└K▌åų¦╝▄�Ż╗7-▌S│ąČ╦╔w
ĪĪĪĪ
łD2┼┼└K▌åĮY(ji©”)śŗ(g©░u)╝░└@└K╩ŠęŌłD
ĪĪĪĪ
2.4īŹ(sh©¬)Ģr(sh©¬)▒O(ji©Īn)£y(c©©)╣”─▄
ĪĪĪĪ
×ķ┴╦╠ßĖ▀Š«Ž┬Š╚į«░▓╚½ąįŻ¼īŹ(sh©¬)Ģr(sh©¬)šŲ╬šĮg▄ćū„śI(y©©)ĀŅæB(t©żi)’@Ą├ė╚×ķųžę¬���ĪŻĖ∙ō■(j©┤)«ö(d©Īng)Ū░Įg▄ćĖ„▓┐╝■╩▄┴”Ą╚Ūķørą┼Žó�Ż¼ĮY(ji©”)║Ž«ö(d©Īng)Ū░Š«Ž┬Š╚į«ąĶŪ¾��Ż¼╝░Ģr(sh©¬)š{(di©żo)š¹Š╚į«ū„śI(y©©)ĘĮ░Ė��ĪŻęį═∙ķ_░l(f©Ī)Ą─Įg▄ćčbų├┤¾▓┐ĘųĮĶų·õN▌S║═└Ł┴”é„ĖąŲ„���Ż¼Ė∙ō■(j©┤)é„ĖąŲ„’@╩ŠöĄ(sh©┤)ō■(j©┤)����Ż¼ī”(du©¼)Įg▄ćū„śI(y©©)▀M(j©¼n)ąą▒O(ji©Īn)£y(c©©)[8]ĪŻė╔ė┌▀@ą®▒O(ji©Īn)£y(c©©)ĘĮ░ĖĄ─é„ĖąŲ„▓╝įO(sh©©)╬╗ų├▓╗║Ž└Ē�Ż¼ąĶę¬▒O(ji©Īn)£y(c©©)āx▒Ē’@╩ŠöĄ(sh©┤)ō■(j©┤)���Ż¼ī¦(d©Żo)ų┬ā╔ĘNé„ĖąŲ„Ą─┴┐│╠▓╗═¼��Ż¼ĮĄĄ═┴╦▒O(ji©Īn)£y(c©©)Š½£╩(zh©│n)Č╚����ĪŻ×ķ┴╦Åøča(b©│)ęį═∙é„ĖąŲ„╬╗ų├▓╝įO(sh©©)Ą─▓╗ūŃŻ¼▒ŠčąŠ┐╠ß│÷╗∙ė┌╩▄┴”Ęų╬÷Ą─é„ĖąŲ„▓╝įO(sh©©)╬╗ų├š{(di©żo)š¹▓▀┬į��ĪŻįō▓▀┬įīóé„ĖąŲ„▓╝įO(sh©©)į┌┼┼└KÖC(j©®)śŗ(g©░u)Ż¼═©▀^Ęų╬÷┼┼└K▌åĮY(ji©”)śŗ(g©░u)╝░╩▄┴”Ūķør�����Ż¼Öz“×(y©żn)įO(sh©©)ėŗ(j©¼)ĘĮ░Ė┐╔┐┐ąį����ĪŻ┴Ē═Ō���Ż¼į÷╝ėūįäė(d©░ng)ėŗ(j©¼)╔Ņį¬╝■�����Ż¼└¹ė├įōį¬╝■£y(c©©)į披Ž┬╔ŅČ╚Ż¼═¼Ģr(sh©¬)£y(c©©)┴┐õōĮz└KŽ┬ĮĄ╦┘Č╚��ĪŻŠC║Ž┐╝æ]Š«Ž┬╠ž╩ŌŁh(hu©ón)Š│��Ż¼▀xō±╣ŌļŖŅÉą═į÷┴┐╩ĮŠÄ┤aŲ„ū„×ķ┤╦ĒŚ(xi©żng)╣”─▄Ą─║╦ą─į¬╝■����Ż¼▓╔ė├ÅŚąį▄øĮė╩ųĘ©Ż¼┼cäx▄ć▌å▌S▀BĮėĄĮę╗Ų���Ż¼£p╔┘ū„śI(y©©)Łh(hu©ón)Š│ī”(du©¼)┤╦čbų├įņ│╔Ą─Ė╔ö_�ĪŻ
ĪĪĪĪ
3ĄVŠ«Š╚į«Įg▄ć╣”─▄īŹ(sh©¬)¼F(xi©żn)
ĪĪĪĪ
3.1ŽĄĮy(t©»ng)Ę┬šµ─Żą═Ą─śŗ(g©░u)Į©
ĪĪĪĪ
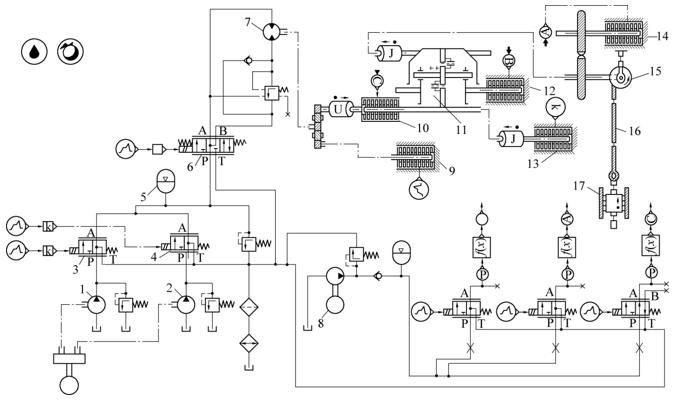
ĻP(gu©Īn)ė┌Š╚į«Įg▄ć╣”─▄Ą─īŹ(sh©¬)¼F(xi©żn)��Ż¼▒ŠčąŠ┐▓╔ė├śŗ(g©░u)Į©ŽĄĮy(t©»ng)Ę┬šµ─Żą═Ą─ĘĮ╩Į�����Ż¼ī”(du©¼)Įg▄ćčbų├╣”─▄▀M(j©¼n)ąą─ŻöM£y(c©©)įćŻ¼═©▀^ė^▓ņ─ŻöM£y(c©©)įćĮY(ji©”)╣¹���Ż¼┼ąöÓįO(sh©©)ėŗ(j©¼)ĘĮ░Ė┐╔┐┐ąįĪŻ▒Š┤╬─ŻöM£y(c©©)įć▀xė├AMESim▄ø╝■ū„×ķĘ┬šµŁh(hu©ón)Š│┤ŅĮ©╣żŠ▀�����Ż¼įO(sh©©)ėŗ(j©¼)╚ńłD3╦∙╩ŠĄ─ŽĄĮy(t©»ng)Ę┬šµ─Żą═���ĪŻ
ĪĪĪĪ
ĪĪĪĪ
1-┤¾▒├Ż╗2-Č■▒├����Ż╗3-┤¾▒├┐žųŲŽ┬Ą─═©öÓķyŻ╗4-Č■▒├┐žųŲŽ┬Ą─═©öÓķy���Ż╗5-ų„ė═┬ĘąŅ─▄Ų„Ż╗
ĪĪĪĪ
6-╔²ĮĄūįäė(d©░ng)╗»▓┘┐žų„┐žķy���Ż╗7-ę║ē║ū„śI(y©©)±R▀_(d©ó)Ż╗8-Ž╚ī¦(d©Żo)▒├�����Ż╗9-±R▀_(d©ó)ųŲäė(d©░ng)Ų„�����Ż╗
ĪĪĪĪ
10-ŠĒ═▓ļx║ŽŲ„�����Ż╗11-ā╚(n©©i)▓ž╩ĮąąąŪ£p╦┘ÖC(j©®)�����Ż╗12-ųŲäė(d©░ng)ŃQ��Ż╗13-ųŲäė(d©░ng)Ų„Ż©£p╦┘ū„śI(y©©)┐žųŲŻ®����Ż╗
ĪĪĪĪ
14-ųŲäė(d©░ng)ŃQŻ╗15-ŠĒ═▓����Ż╗16-╔²ĮĄõōĮz└K����Ż╗17-ųž╬’╠ß╔²┐žųŲÖC(j©®)ųŲ
ĪĪĪĪ
łD3 ŽĄĮy(t©»ng)Ę┬šµ─Żą═
ĪĪĪĪ
3.2Š╚į«Įg▄ćū„śI(y©©)┐žųŲĘĮĘ©╝░äė(d©░ng)ū„▀ē▌ŗĻP(gu©Īn)ŽĄįO(sh©©)ų├
ĪĪĪĪ
▒ŠŽĄĮy(t©»ng)Ę┬šµ─Żą═ų„ę¬ė╔ā╔▓┐Ęųśŗ(g©░u)│╔��Ż¼Ęųäe╩Ūę║ē║äė(d©░ng)┴”ŽĄĮy(t©»ng)�Īóę║ē║ųŲäė(d©░ng)ŽĄĮy(t©»ng)�ĪŻŲõųąŻ¼äė(d©░ng)┴”ŽĄĮy(t©»ng)ū„śI(y©©)“ī(q©▒)äė(d©░ng)┴”Ą─╣®Įo����Ż¼└¹ė├ļp┬ō(li©ón)▒├▀M(j©¼n)ąąū„śI(y©©)�����Ż¼Ė∙ō■(j©┤)ū„śI(y©©)ąĶŪ¾įO(sh©©)ų├┴„┴┐║═ē║┴”ģóöĄ(sh©┤)ĪŻĻP(gu©Īn)ė┌ę║ē║ųŲäė(d©░ng)ŽĄĮy(t©»ng)Ą─ū„śI(y©©)����Ż¼▀x╚Īęń┴„ķy�����ĪóŽ╚ī¦(d©Żo)▒├ū„×ķų„ę¬ū„śI(y©©)čbų├��Ż¼į┌▀@ā╔ĘNśŗ(g©░u)╝■Ą─ū„ė├Ž┬«a(ch©Żn)╔·ē║┴”���Ż¼ū„ė├į┌ē║┴”ė═╔Ž�����Ż¼ęį┤╦«a(ch©Żn)╔·ųŲäė(d©░ng)┴”Šž����Ż¼Å─Č°▒ŻūCĮg▄ćÖC(j©®)ąĄ▓┐Ęų╣”─▄Ą├ęįīŹ(sh©¬)¼F(xi©żn)��Ż¼░³└©ļx║ŽĪóųŲäė(d©░ng)���Īóäx▄ćĪŻ
ĪĪĪĪ
▒ŠčąŠ┐įO(sh©©)ėŗ(j©¼)Ą─Įg▄ć▌ö╚ļäė(d©░ng)┴”×ķę║ē║±R▀_(d©ó)�����Ż¼įōčbų├«a(ch©Żn)╔·Ą─ū„ė├┴”Ħäė(d©░ng)£p╦┘ÖC(j©®)��Ż¼┐žųŲ▐D(zhu©Żn)Šž▌ö│÷ģóöĄ(sh©┤)ĘČć·��Ż¼ū„ė├į┌ŠĒ═▓╔Ž��Ż¼Å─Č°ėąą¦┐žųŲŠĒ═▓Č©▌S▐D(zhu©Żn)äė(d©░ng)╦┘┬╩�ĪŻĖ∙ō■(j©┤)Š«Ž┬Š╚į«ąĶŪ¾�����Ż¼š{(di©żo)╣Ø(ji©”)▌ö╚ļäė(d©░ng)┴”ģóöĄ(sh©┤)öĄ(sh©┤)ųĄ�Ż¼ęį┤╦┐žųŲĮg▄ćŽ┬Ę┼║═╠ß╔²äė(d©░ng)ū„╦┘Č╚���ĪŻĻP(gu©Īn)ė┌Įg▄ćčbų├╣”─▄┐žųŲĄ─Ė„ĒŚ(xi©żng)▀ē▌ŗĻP(gu©Īn)ŽĄĄ─įO(sh©©)ėŗ(j©¼)����Ż¼╚ń▒Ē1╦∙╩Š����ĪŻ
ĪĪĪĪ
▒Ē1 Š╚į«Įg▄ćäė(d©░ng)ū„▀ē▌ŗĻP(gu©Īn)ŽĄ
ĪĪĪĪ
ųŲäė(d©░ng)▓┐╝■ ųŲäė(d©░ng)ŃQA ųŲäė(d©░ng)ŃQB ±R▀_(d©ó)┐žųŲŲ„ ŠĒ═▓ļx║ŽŲ„ £p╦┘ÖC(j©®)ųŲäė(d©░ng)Ų„
ĪĪĪĪ
═Żų╣ū„śI(y©©) 1 0 1 0 1
ĪĪĪĪ
╠ß╔²ū„śI(y©©) 0 1 0 1 0
ĪĪĪĪ
äx▄ćųŲäė(d©░ng) 1 0 0 1 0
ĪĪĪĪ
ŲĮ║ŌŽ▐╦┘ 1 1 0 1 0
ĪĪĪĪ
ūįė╔ÆüŃ^ 0 0 1 0 0
ĪĪĪĪ
3.3╣”─▄£y(c©©)įćĮY(ji©”)╣¹Ęų╬÷
ĪĪĪĪ
▒Š┤╬£y(c©©)įćęįõōĮz└Kä“╦┘ū„śI(y©©)��Īóūįäė(d©░ng)┼┼└K����ĪóĄVŠ«╔ŅČ╚£y(c©©)┴┐š`▓ŅĪóųŲäė(d©░ng)▓┐╝■ū„śI(y©©)╣”─▄��Īó─ŻöMŠ╚į«ą¦┬╩╠ß╔²Ūķørū„×ķ╣”─▄£y(c©©)įćųĖś╦(bi©Īo)�����Ż¼ĮM┐Ś4ĮM─ŻöM£y(c©©)įć�����Ż¼Įy(t©»ng)ėŗ(j©¼)ĮM£y(c©©)įćĮY(ji©”)╣¹�����Ż¼īó┐é¾w£y(c©©)įćĮY(ji©”)╣¹ģR┐éų┴▒Ē2��ĪŻ
ĪĪĪĪ
▒Ē2 ╣”─▄£y(c©©)įćĮY(ji©”)╣¹
ĪĪĪĪ
£y(c©©)įćŠÄ╠¢(h©żo) £y(c©©)įćĒŚ(xi©żng)Ż©╬┤═ĻŻ¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|