|
╗∙ė┌STM32å╬Ų¼ÖCĄ─ųŪ─▄Ž¹Ę└ÖCŲ„╚╦įOėŗ蹊┐
ÅłÜJĪĪ2022/9/11 9:09:09
Ż©Įė╔ŽĒōŻ®MIĮė┐┌’@╩Š│÷üĒŻ¼═©▀^Ė▀ŪÕłDŽ±─ŻēK▀Mąą¤oŠĆłDŽ±Ą─é„▌ö����Ż¼į┌║¾┼_╩╣ė├▀b┐žŲ„▀MąąözŽ±Ņ^Ą─┐žųŲŻ¼īŹĢrąį�����ĪóŪÕ╬·ąįīóęĢŅl║═łDŽ±’@╩Š│÷üĒ���ĪŻČ°▄ć¾w═Ō▓┐ätąĶę¬įOėŗūįäė╗»╗×─ćŖ┴▄ŽĄĮy(t©»ng)����Ż¼▀Mąą▄ć¾wĄ─ūįų„ĮĄ£ž����Ż¼ŅAĘ└į┌░l(f©Ī)╔·╗×─╩┬╣╩Ą─▀^│╠ųą▄ć¾wĄ─┴Ń▓┐╝■╩▄ĄĮōp║”[1]�����ĪŻ
ĪĪĪĪ
ĪĪĪĪ
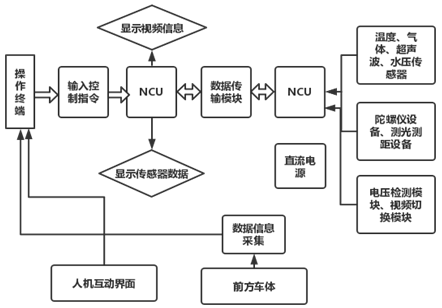
łD1 ųŪ─▄Ž¹Ę└ÖCŲ„╚╦Ą─įOėŗ
ĪĪĪĪ
1.2 ▄øė▓╝■Ą─įOėŗ
ĪĪĪĪ
1.2.1 ė▓╝■Ą─įOėŗ
ĪĪĪĪ
š¹¾wŽĄĮy(t©»ng)ė▓╝■╩Ūė╔ęįSTM32å╬Ų¼ÖC×ķ║╦ą─Ą─Ž┬╬╗ÖC▓┐Ęų║═╔Ž╬╗ÖC▓┐ĘųĮM║ŽČ°│╔�Ż¼īóSTM32å╬Ų¼ÖCąŠŲ¼«öū÷╩Ū║╦ą─┐žųŲ░Õ���Ż¼┤_▒Ż╦∙ėą╣”─▄Ą─īŹ¼F(xi©żn)��ĪŻ
ĪĪĪĪ
Ż©1Ż®╔Ž╬╗ÖCĄ─įOėŗ
ĪĪĪĪ
╔Ž╬╗ÖCįOėŗĄ──┐Ą─į┌ė┌£╩┤_▀Mąą╗¶Ā¢╩ų▒·┐žųŲą┼╠¢Ą─ūx╚Ī����Īó▓┘ū„┼_ųąĖ„éĆ╣”─▄┐žųŲą┼╠¢Ą─ūx╚Ī��Ż¼└¹ė├A/D▐DōQ─Ż╩Įī”ą┼╠¢▀Mąą▐DōQ�����Ż¼╩╣ė├öĄ(sh©┤)ō■(j©┤)é„▌ö?sh©┤)──ŻēKīóą┼ŽóöĄ(sh©┤)ō■(j©┤)░l(f©Ī)╦═ĄĮŽ┬╬╗ÖCĄ─ų„┐žųŲŲ„ā╚��Ż¼ęį▓┘ū„╩ų▒·ųą╦∙ūx╚ĪĄ─öĄ(sh©┤)ō■(j©┤)ą┼Žó«öū„╩Ūū°ś╦ŽĄų«ā╚▓┘ū„╩ų▒·īŹļH╬╗ų├Ą─ū°ś╦����ĪŻ
ĪĪĪĪ
Ż©2Ż®Ž┬╬╗ÖCĄ─įOėŗ
ĪĪĪĪ
×ķ┴╦┤_▒ŻŽ┬╬╗ÖCĄ─æ¬ė├┐╔ęįėąą¦▀Mąą▄ć¾w┐žųŲ�����Ż¼ąĶꬎ╚▀Mąą▀\äė▀ē▌ŗĄ─Ęų╬÷�Ż¼╚ń╣¹ū¾é╚ļŖÖC║═ėęé╚ļŖÖCĄ─š²▐D▐D╦┘ŽÓ═¼���Ż¼Š═┐╔┐žųŲ▄ć▌vŽ“ų°Ū░ĘĮąą±éŻ¼Č°╚ń╣¹ū¾é╚║═ėęé╚Ą─ļŖÖCįOéõš²▐D╦┘Č╚▓╗═¼���Ż¼Š═┐╔┐žųŲ▄ć▌vŽ“ū¾é╚╗“╩Ūėęé╚▐Däė�ĪŻ╚ń╣¹ū¾é╚┼cėęé╚Ą─ļŖÖCįOéõ▀\▐D╦┘Č╚ŽÓ═¼Ą½╩Ū╠Äė┌Ę┤▐DĀŅæB(t©żi)�����Ż¼Š═┐╔┐žųŲ▄ć▌vŽ“ų°║¾ĘĮŽ“ąą±é��ĪŻį┌ū¾é╚ļŖÖC║═ėęé╚ļŖÖC▐D╦┘▓╗═¼Ūę╠Äė┌Ę┤▐DĀŅæB(t©żi)�����Ż¼Š═┐╔╩╣▄ć▌vū¾║¾Ą╣▄ć╗“╩Ūėę║¾Ą╣▄ć���ĪŻ
ĪĪĪĪ
ĪĪĪĪ
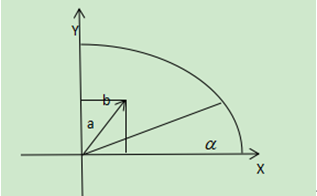
łD2 ╗¶Ā¢╩ų▒·ū°ś╦
ĪĪĪĪ
╚ńłD2╦∙╩Š�����Ż¼īóĢ■╩ų▒·įOų├×ķėęé╚╔ŽĘĮĄ┌ę╗Ž¾Ž▐�Ż¼╩ų▒·═ŲäėĄĮūŅ▀hĄ─╬╗ų├Ż¼╩╣š¹éĆ¼F(xi©żn)Ž¾ųąĄ─▀\äė│╔×ķłA╗Ī�����Ż¼įOų├░ļÅĮa�����Ż¼īóŲõū„×ķļŖÖCļŖē║ūŅĖ▀Ą─öĄ(sh©┤)ō■(j©┤)ųĄ�����Ż¼╩ų▒·ęŲäė╬╗ų├b�Ż¼īóŲõū„×ķīŹļHļŖÖCļŖē║Ą─öĄ(sh©┤)ō■(j©┤)ųĄŻ¼å╬Ų¼ÖCį┌ūx╚ĪöĄ(sh©┤)ō■(j©┤)ųĄĄ─▀^│╠ųą�Ż¼ūx╚ĪĄĮ═ŲŚUĒöČ╦ū°ś╦Ż©x,yŻ®Ą─öĄ(sh©┤)ō■(j©┤)ą┼ŽóŻ¼┐╔░┤ššŽ┬┴ą╣½╩Į▀MąąböĄ(sh©┤)ō■(j©┤)ųĄ�����ĪómöĄ(sh©┤)ō■(j©┤)ųĄ║═ öĄ(sh©┤)ō■(j©┤)ųĄĄ─ėŗ╦ŃĘų╬÷[2]�����ĪŻ
ĪĪĪĪ

ĪĪĪĪ
╣½╩Įų«ā╚m┤·▒ĒĄ─╩Ūū¾é╚ļŖÖC║═ėęé╚ļŖÖCūŅĖ▀ļŖē║öĄ(sh©┤)ō■(j©┤)ųĄŻ¼ ┤·▒Ēų°▓┘ū„▓óį┌ģó┐╝ŽĄų«ā╚Ą─▓┘ū„ĘĮŽ“Ž“┴┐ĮŪČ╚öĄ(sh©┤)ō■(j©┤)ųĄ�Ż¼░┤šš┤╦ŅÉ╣½╩Į▀Mąąėŗ╦ŃĘų╬÷Ż¼½@Ą├ŽÓæ¬Ą─ģóöĄ(sh©┤)ųĖś╦����Ż¼ūŅĮK▀MąąļŖśO┐žųŲ▀ē▌ŗĘų╬÷║═ėŗ╦ŃŻ¼╚ń▒Ē1╦∙╩ŠŻ║
ĪĪĪĪ
▒Ē1.ļŖÖC┐žųŲ▀ē▌ŗ║═ėŗ╦Ń
ĪĪĪĪ
ļŖÖC x║═yČ╝╩Ūš²öĄ(sh©┤) x×ķžōöĄ(sh©┤)���Ż¼y×ķš²öĄ(sh©┤) x║═yČ╝╩ŪžōöĄ(sh©┤) x╩Ūš²öĄ(sh©┤)Ż¼y╩ŪžōöĄ(sh©┤)
ĪĪĪĪ
ū¾é╚ m -m
ĪĪĪĪ
ėęé╚ m -m
ĪĪĪĪ
▓┘ū„▀ē▌ŗ Ž“ėęé╚Ū░ĘĮŽ“▐DÅØ Ž“ū¾é╚Ū░ĘĮŽ“▐DÅØ Ž“ū¾é╚║¾ĘĮŽ“Ą╣▄ć Ž“ėęé╚║¾ĘĮŽ“Ą╣▄ć
ĪĪĪĪ
│²┴╦┐╔ęį▀Mąą╔Ž╩÷Ė„ŅÉäėū„Ą─┐žųŲ�����Ż¼▀Ć─▄═©▀^ī”ū¾é╚║═ėęé╚ļŖÖC▀MąąŽÓ═¼▐D╦┘Ą─┐žųŲ��Ż¼▀MąąŽÓĘ┤▐DŽ“Ą─š{┐ž�Ż¼╩╣▄ć▌vį┌įŁĄžą²▐DĪŻ
ĪĪĪĪ
┴Ē═Ō����Ż¼┐žųŲ┼_▓┘ū„├µ░ÕĄ─īŹļH▓┘ū„▀^│╠ųą▀Ć─▄▀Mąą╦«┼┌╔Žč÷┐žųŲĪóŽ“Ž┬▓┘ū„Ą─┐žųŲ��Īóū¾é╚║═ėęé╚ö[äėĄ─┐žųŲĪó╦«┴„ćŖ╔õ┤ļ╩®ŪąōQĄ─┐žųŲĄ╚�����Ż¼═¼Ģr▀Mąąė^▓ņįŲ┼_Ą─┐žųŲ���ĪóĘõ°QŲ„Ą─┐žųŲ���Īóäx▄ć┐žųŲĪóšš├„ŽĄĮy(t©»ng)┐žųŲĄ╚��ĪŻ
ĪĪĪĪ
1.2.2 ▄ø╝■Ą─įOėŗ
ĪĪĪĪ
Ż©1Ż®▄ø╝■įOėŗ╦╝┬Ę
ĪĪĪĪ
į┌ŽĄĮy(t©»ng)▄ø╝■įOėŗĄ─▀^│╠ųąąĶę¬ęįKEILŁh(hu©ón)Š│×ķ╗∙ĄA▀Mąą┐žųŲ░ÕĄ─ŠÄ│╠���Ż¼▓╔ė├CšZčį▀Mąą┐žųŲ│╠ą“Ą─ŠÄīæ���Ż¼ė╔ė┌STM32å╬Ų¼ÖCąŠŲ¼Š▀ėąå╬éĆų▄Ų┌DSPųĖ┴Ņ┼cFPUĖĪ³cå╬į¬Ż¼ėŗ╦ŃĄ─ąį─▄▌^Ė▀���Ż¼ę“┤╦į┌öĄ(sh©┤)ō■(j©┤)ą┼Žóėŗ╦ŃĘĮ├µ─▄ē“╣Ø(ji©”)╝s┤¾┴┐Ģrķg�Ż¼▀Ć─▄×ķ│╠ą“ł╠(zh©¬)ąą�ĪóöĄ(sh©┤)ō■(j©┤)ą┼Žóé„▌ö?sh©┤)╚╠ß╣®ų¦│ųŻ¼╝ė┐ņö?sh©┤)ō■(j©┤)╠Ä└Ē║═é„▌ö?sh©┤)─╦┘┬╩��Ż¼ØMūŃŽĄĮy(t©»ng)įOėŗś╦£╩ę¬Ū¾Ż¼ę“┤╦┤╦┤╬ŽĄĮy(t©»ng)Ą─įOėŗīóSTM32å╬Ų¼ÖCū„×ķ▄ø╝■Ą─║╦ą─ąŠŲ¼��Ż¼┤_▒ŻŽĄĮy(t©»ng)Ą─┴╝║├▀\ąą[3]�����ĪŻ
ĪĪĪĪ
Ż©2Ż®╔Ž╬╗ÖC┐žųŲ▄ø╝■įOėŗ
ĪĪĪĪ
į┌įOėŗ╔Ž╬╗ÖC┐žųŲ▄ø╝■Ą─▀^│╠ųą��Ż¼æ¬═Ļ╔Ų▄ø╝■Ą─▓┘ū„┴„│╠�����Ż¼╚ńłD3╦∙╩Š����Ż¼š¹¾w▄ø╝■į┌æ¬ė├Ą─▀^│╠ųą��Ż¼ąĶꬎ╚═Ļ│╔ŽĄĮy(t©»ng)║══©ą┼─ŻēKĄ─│§╩╝╗»▓┘ū„����Ż¼▀M╚ļĄĮų„裣h(hu©ón)Ą─▓┐ĘųŻ¼╚ń╣¹▓┘ū„┼_ė╔╣żū„╚╦åT▀Mąą▓┘ū„����Ż¼Š═┐╔ęį═©▀^A/D▐DōQĄ──Ż╩Įī”┐žųŲą┼╠¢▐DōQ��Ż¼▀M╚ļĄĮå╬Ų¼ÖCųą▀MąąŠÅ┤µ╠Ä└Ē����Ż¼ų«║¾▌ö╦═ĄĮöĄ(sh©┤)ō■(j©┤)é„▌ö─ŻēK��Ż¼į┘░l(f©Ī)╦═ĄĮŽ┬╬╗ÖCįOéõ����ĪŻį┌┤╦Ų┌ķgŻ¼å╬Ų¼ÖC─▄ē“Å─öĄ(sh©┤)ō■(j©┤)é„▌ö─ŻēKā╚▀MąąŽ┬╬╗ÖC╦∙Öz£yĄ─é„ĖąöĄ(sh©┤)ō■(j©┤)ą┼ŽóĄ─ūx╚Ī���Ż¼Č°║¾░l(f©Ī)╦═ĮoöĄ(sh©┤)ūų’@╩ŠŲ┴─╗�����Ż¼īóŽÓĻPą┼Žó╚½├µ’@╩Š│÷üĒ�ĪŻ
ĪĪĪĪ
ĪĪĪĪ
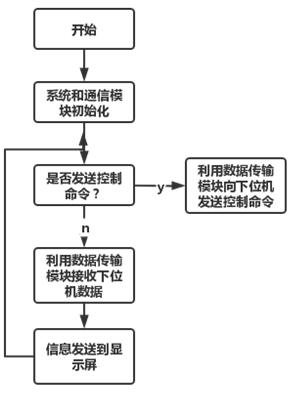
łD3 ╔Ž╬╗ÖC┐žųŲ│╠ą“Ą─┴„│╠
ĪĪĪĪ
Ż©3Ż®Ž┬╬╗ÖC┐žųŲ▄ø╝■Ą─įOėŗ
ĪĪĪĪ
į┌įOėŗŽ┬╬╗ÖCĄ─┐žųŲ▄ø╝■ŽĄĮy(t©»ng)▀^│╠ųą���Ż¼╚ńłD4╦∙╩Š����Ż¼ąĶꬎ╚│§╩╝╗»╠Ä└ĒŻ¼╚╗║¾ī”é„ĖąŲ„öĄ(sh©┤)ō■(j©┤)ą┼Žó▀Mąąūx╚Ī�Ż¼īóöĄ(sh©┤)Ż©╬┤═ĻŻ¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|