|
╗∙ė┌STM32å╬Ų¼ÖC(j©®)Ą─ųŪ─▄Ž¹Ę└ÖC(j©®)Ų„╚╦įO(sh©©)ėŗ(j©¼)蹊┐
ÅłÜJĪĪ2023/6/24 9:05:00
Ż©Įė╔ŽĒōŻ®╬÷��Ż¼▐D(zhu©Żn)ōQ│╔PWM┐žųŲą┼╠¢��Ż¼ĮĶų·┤«┐┌īóą┼╠¢é„╦═[4]ĪŻ
ĪĪĪĪ
ĪĪĪĪ
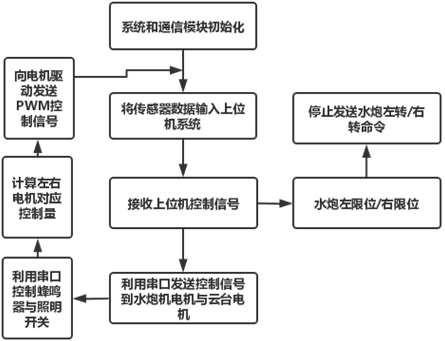
łD4 Ž┬╬╗ÖC(j©®)┐žųŲ▄ø╝■▓┘ū„┴„│╠
ĪĪĪĪ
Ż©4Ż®łDŽ±╠Ä└Ē░ū╗»╦ŃĘ©▄ø╝■įO(sh©©)ėŗ(j©¼)
ĪĪĪĪ
Į³─ĻüĒ�����Ż¼į┌┐ŲīW(xu©”)╝╝ąg(sh©┤)┐ņ╦┘░l(f©Ī)š╣Ą─▀^│╠ųą����Ż¼ÖC(j©®)Ų„╚╦łDŽ±╠Ä└Ē╝╝ąg(sh©┤)Š▀ėąČÓį¬╗»╠ž³c(di©Żn)Ż¼Č°▒Š┤╬ŽĄĮy(t©»ng)Ą─įO(sh©©)ėŗ(j©¼)╩ŪīóSTM32å╬Ų¼ÖC(j©®)ū„×ķ║╦ą─▓┐Ęų�����Ż¼ę“┤╦ų„ę¬╩╣ė├░ū╗»╦ŃĘ©╝╝ąg(sh©┤)ĘĮ╩Įėąą¦ĮŌøQÖC(j©®)Ų„╚╦łDŽ±│╔Ž±å¢Ņ}[5]���ĪŻ
ĪĪĪĪ
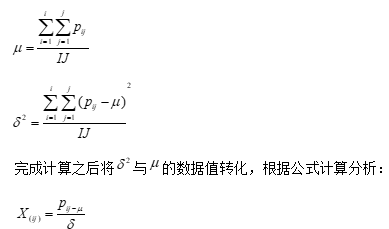
Ž¹Ę└ÖC(j©®)Ų„╚╦į┌▀M(j©¼n)ąą╗×─(z©Īi)ōõŠ╚║═ōīļU(xi©Żn)Ų┌ķgŻ¼┐╔─▄Ģ■│÷¼F(xi©żn)╬’¾wĘ┤╔õ╣Ō┴┴�Īóšš├„ÅŖ(qi©óng)Č╚▀^Ė▀Ą─å¢Ņ}Ż¼ī¦(d©Żo)ų┬özŽ±┼─öz╩▄ĄĮ▓╗└¹ė░Ēæ�����Ż¼│÷¼F(xi©żn)▓╗┤_Č©ąįĄ─’L(f©źng)ļU(xi©Żn)��Ż¼ŽĄĮy(t©»ng)╦∙▓╔╝»Ą─łDŽ±║═ęĢŅlĄ╚ŪÕ╬·Č╚ļyęįĘ¹║Žś╦(bi©Īo)£╩(zh©│n)����ĪŻ×ķėąą¦ŅA(y©┤)Ę└┤╦ŅÉ▓╗┤_Č©ąįę“╦ž╦∙ĦüĒĄ─ė░Ēæ�Ż¼į┌ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)ĘĮ├µ����Ż¼æ¬(y©®ng)║Ž└ĒįO(sh©©)ėŗ(j©¼)łDŽ±Ą─░ū╗»╦ŃĘ©▄ø╝■Ż¼╩š╝»łDŽ±Ą─Ž±╦ž?c©ói)?sh©┤)ō■(j©┤)ųĄą┼Žó�Ż¼īóŲõ▐D(zhu©Żn)ūā│╔×ķŲĮŠ∙öĄ(sh©┤)ō■(j©┤)ųĄ┼cå╬╬╗ĘĮ▓ŅöĄ(sh©┤)ō■(j©┤)ųĄĪŻį┌▄ø╝■īŹ(sh©¬)ļH▀\(y©┤n)ąąĄ─▀^│╠ųąŽ╚▀M(j©¼n)ąąįŁ╩╝╗ęČ╚łDŽ±PŽ±╦ž?c©ói)?sh©┤)ō■(j©┤)ųĄĄ─Ęų╬÷��Ż¼░┤ššŽ┬┴ą╣½╩Į▀M(j©¼n)ąąŽ±╦žĘĮ▓ŅöĄ(sh©┤)ō■(j©┤)ųĄ ║═ŲĮŠ∙öĄ(sh©┤)ō■(j©┤)ųĄ Ą─ėŗ(j©¼)╦Ń����ĪŻ
ĪĪĪĪ
ĪĪĪĪ
▒ŠŽĄĮy(t©»ng)Ą─įO(sh©©)ėŗ(j©¼)ąĶę¬īó╗ęČ╚łDŽ±▐D(zhu©Żn)ūā│╔×ķ▓╩╔½łDŽ±Ż¼ę“┤╦æ¬(y©®ng)ĘųäeįO(sh©©)ų├▓╗═¼Ą─╚²éĆ(g©©)═©Ą└�����Ż¼ī” ┼c öĄ(sh©┤)ō■(j©┤)ųĄŠ½£╩(zh©│n)ėŗ(j©¼)╦Ń��Ż¼ĮY(ji©”)║Ž╣½╩Į▀M(j©¼n)ąąŽ±╦žĄ─▐D(zhu©Żn)╗»╠Ä└Ē�ĪŻ═¼Ģr(sh©¬)į┌ŽĄĮy(t©»ng)▀\(y©┤n)ąąŲ┌ķg┐╔ęįĮY(ji©”)║Žė▓╝■ŲĮ┼_Ą─╠ž³c(di©Żn)Ż¼║Ž└Ē▀M(j©¼n)ąą░ū╗»╦ŃĘ©▄ø╝■Ą─æ¬(y©®ng)ė├���Ż¼═©▀^STM32å╬Ų¼ÖC(j©®)���Ż¼£╩(zh©│n)┤_▀M(j©¼n)ąąėŗ(j©¼)╦Ń╠Ä└Ē║═×V▓©╠Ä└Ē�Ż¼└¹ė├łDŽ±┤µā”Ų„Ą─įO(sh©©)éõ║═ŽĄĮy(t©»ng)▀M(j©¼n)ąą«ŗ├µĮž╚Ī����Ż¼ūŅĮK╩╣ė├ ═Ļ│╔łDŽ±ą¦╣¹Ą─ė^▓ņ[6]ĪŻ
ĪĪĪĪ
1.3 š¹¾wÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ(j©¼)
ĪĪĪĪ
░┤ššųŪ─▄Ž¹Ę└ÖC(j©®)Ų„╚╦Š▀¾wĄ─æ¬(y©®ng)ė├ąĶŪ¾���Ż¼į┌▄ć¾wš¹¾wĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ(j©¼)Ą─▀^│╠ųąąĶę¬┤_▒Żį┌ØMūŃŲĮĄžąą±éę¬Ū¾Ą─╗∙ĄA(ch©│)╔Ž�����Ż¼─▄ē“į┌ą▒Ų┬ģ^(q©▒)���ĪóśŪ╠▌ģ^(q©▒)ė“║═Ęe╦«ģ^(q©▒)ė“░▓╚½±{±é▀\(y©┤n)ąą��Ż¼Š▀éõę╗Č©Ą─╠ž╩Ō╣”─▄���Ż¼└²╚ńŻ║┐╔ęįį┌═▌ģ^(q©▒)╗“╩ŪĘe╦«Ą─ģ^(q©▒)ė“š²│Żąą±é���Ż¼═¼Ģr(sh©¬)ę▓─▄▀M(j©¼n)ąą┼└Ų┬Īó┐ńįĮšŽĄK�����Ż¼┐╔į┌įŁĄž▀M(j©¼n)ąąūįė╔ą²▐D(zhu©Żn)ĪŻ┤╦ŪķørŽ┬���Ż¼Į©ūhįO(sh©©)ėŗ(j©¼)┬─ĦŅÉą═Ą─ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)�����Ż¼╚ńłD5╦∙╩Š����ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD5 ┬─ĦŅÉą═ąąū▀ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)
ĪĪĪĪ
Å─▒Š┘|(zh©¼)īė├µČ°čį���Ż¼┬─ĦŅÉą═ĮY(ji©”)śŗ(g©░u)į┌æ¬(y©®ng)ė├▀^│╠ųą║═Ąž├µĮėė|├µĘe║▄┤¾�Ż¼ėą║▄ÅŖ(qi©óng)Ą─ĖĮų°┴”║═Ā┐ę²─▄┴”�����Ż¼─▄ē“į┌Ęe╦«Ą└┬Ę║═─ÓضĄ└┬Ęąąū▀�����Ż¼═©▀^ąį║▄Ė▀����ĪŻš¹¾w▄ć¾wĄ─╝▄śŗ(g©░u)įO(sh©©)ėŗ(j©¼)�Ż¼õX║ŽĮĶTįņ▓─┴Ž���Ż¼▌åŽĄ▓┐Ęųät╩Ūė╔“ī(q©▒)äė(d©░ng)▌å����Īó═Žµ£▌åĄ╚ĮM║Ž│╔��ĪŻį┌īŹ(sh©¬)ļHįO(sh©©)ėŗ(j©¼)Ą─▀^│╠ųą���Ż¼īóŠ½├▄ąąąŪ£p╦┘¤o╦óļŖÖC(j©®)įO(sh©©)éõ����Ż¼┼õų├į┌“ī(q©▒)äė(d©░ng)▌å╔Ž�Ż¼╠ß╔²“ī(q©▒)äė(d©░ng)┴”Ą─╦«ŲĮĪŻČ°ī¦(d©Żo)Ž“▌åätąĶę¬░┤ššĄž├µ─”▓┴ŽĄöĄ(sh©┤)Ą─▓Ņ«Éąį��Ż¼ī”┬─Ħ╦╔ŠoČ╚▀M(j©¼n)ąąš{(di©żo)š¹��Ż¼╩╣┬─Ħį┌▓╗═¼Łh(hu©ón)Š│Č╝─▄▀mæ¬(y©®ng)����ĪŻ┼c┤╦═¼Ģr(sh©¬)┼õų├ų¦ō╬▌åė├üĒ▀M(j©¼n)ąą▄ć¾wųž┴┐Īó╦«Ä¦ųž┴┐║═╦«┼┌ųž┴┐Ą─ųŲ│╔��Ż¼Ųõųą£pšŲ„įO(sh©©)éõĄ─æ¬(y©®ng)ė├�Ż¼─▄ē“ŅA(y©┤)Ę└│÷¼F(xi©żn)▄ć¾wŅŹ¶żĄ─å¢Ņ}Ż¼į÷ÅŖ(qi©óng)▄ć¾wĄ─ĘĆ(w©¦n)Č©ąį║═ŲĮĘĆ(w©¦n)ąį�����Ż¼Ūęų¦ō╬▌å─▄ē“Ė·ļS┬─Ħ▐D(zhu©Żn)äė(d©░ng)░l(f©Ī)╔·▐D(zhu©Żn)äė(d©░ng)����Ż¼ĮĄĄ═ā╔éĆ(g©©)▓┐ĘųĄ──”▓┴ĪŻ│²┤╦ų«═Ō�����Ż¼ĮY(ji©”)║Ž▄ć¾wĄ─ĮY(ji©”)śŗ(g©░u)╠ž³c(di©Żn)įO(sh©©)ėŗ(j©¼)īŻė├Ą─Ž¹Ę└╦«┼┌įO(sh©©)╩®����Ż¼į┌▄ć¾wĄū▓┐ģ^(q©▒)ė“Ą─ųąķg╬╗ų├┼õų├╦«╣▄Ż¼▄ć¾w║¾Ž┬ĘĮĄ─╬╗ų├īó╦«╣▄Įė╚ļ�Ż¼└¹ė├Ū░Č╦╦«┼┌▀M(j©¼n)ąą£ń╗䮥─ćŖ╔õŻ¼į┌īŹ(sh©¬)ļH▀\(y©┤n)ąąŲ┌ķgš¹¾wĮY(ji©”)śŗ(g©░u)Ą─ųžą─║▄Ą═���Ż¼ćŖ╦«Ą─▀^│╠ųą▄ć¾wĘŪ│ŻĘĆ(w©¦n)Č©[7]�ĪŻ
ĪĪĪĪ
2 ╗∙ė┌STM32å╬Ų¼ÖC(j©®)Ą─ųŪ─▄Ž¹Ę└ÖC(j©®)Ų„╚╦Ą─įć“×(y©żn)║═æ¬(y©®ng)ė├
ĪĪĪĪ
2.1 įć“×(y©żn)┤ļ╩®
ĪĪĪĪ
╗∙ė┌ STM32å╬Ų¼ÖC(j©®)ųŪ─▄╗»Ž¹Ę└ÖC(j©®)Ų„╚╦įO(sh©©)ėŗ(j©¼)═Ļ│╔ų«║¾Ż¼×ķ┤_▒ŻįO(sh©©)éõ║═ŽĄĮy(t©»ng)Ą─┴╝║├æ¬(y©®ng)ė├�Ż¼ąĶę¬ū÷║├įć“×(y©żn)£yįć╣żū„Ż¼▓╔ė├║Ž└ĒĄ─įć“×(y©żn)Ęų╬÷ĘĮ╩Į├„┤_įO(sh©©)éõ║═ŽĄĮy(t©»ng)Ą─æ¬(y©®ng)ė├╩Ūʱ┤µį┌å¢Ņ}�����Ż¼╝░Ģr(sh©¬)▀M(j©¼n)ąąŽĄĮy(t©»ng)║═įO(sh©©)éõĄ─Ė─▀M(j©¼n)ā×(y©Łu)╗»���ĪŻ
ĪĪĪĪ
Ż©1Ż®║Ž└Ē▀M(j©¼n)ąą╦┘Č╚įć“×(y©żn)
ĪĪĪĪ
īŹ(sh©¬)“×(y©żn)▀^│╠ųąīóÖC(j©®)Ų„╚╦įO(sh©©)ų├į┌Ą└┬Ęųąąą±é���Ż¼▀M(j©¼n)ąą▀\(y©┤n)ąą╦┘Č╚Ą─£yįćŻ¼£yįćų«║¾░l(f©Ī)¼F(xi©żn)��Ż¼ÖC(j©®)Ų„╚╦į┌ł╠(zh©¬)ąąĄ└┬Ęųą▀\(y©┤n)ąą╦┘Č╚×ķ├┐ąĪĢr(sh©¬)3Ū¦├ūū¾ėę��Ż¼ūŅĖ▀┼└Ų┬ĮŪČ╚36Č╚Ą─ŪķørŽ┬�Ż¼ąąū▀╦┘Č╚┐╔ęį▀_(d©ó)ĄĮ├┐ąĪĢr(sh©¬)0.9Ū¦├ūŻ¼ų▒ŠĆąąū▀200├ūĄ─ĘČć·ā╚(n©©i)��Ż¼ļm╚╗Ģ■│÷¼F(xi©żn)ĘĮŽ“š`▓ŅŲ½ęŲĄ─å¢Ņ}��Ż¼Ą½─▄ē“ØMūŃŠ▀¾wĄ─īŹ(sh©¬)█`æ¬(y©®ng)ė├ś╦(bi©Īo)£╩(zh©│n)ę¬Ū¾[8]���ĪŻ
ĪĪĪĪ
Ż©2Ż®łDŽ±Ę┬šµįć“×(y©żn)
ĪĪĪĪ
łDŽ±Ę┬šµīŹ(sh©¬)“×(y©żn)Ą─▀^│╠ųąĘ┬šµšµīŹ(sh©¬)Ą─╗×─(z©Īi)¼F(xi©żn)ł÷łDŽ±�����Ż¼įć“×(y©żn)═Ļ│╔║¾┐╔ęį░l(f©Ī)¼F(xi©żn)Ų┴─╗ųą╦∙’@╩ŠĄ─łDŽ±���Ż¼ø]ėąĘŪ│Ż├„’@Ą─▓©╝y║═č®╗©Ż¼┐╔ęįØMūŃæ¬(y©®ng)ė├Ą─ś╦(bi©Īo)£╩(zh©│n)ęÄ(gu©®)ĘČ�����ĪŻ
ĪĪĪĪ
Ż©3Ż®╦«┼┌Ą─įć“×(y©żn)
ĪĪĪĪ
░┤ššę¬Ū¾į┌ÖC(j©®)Ų„╚╦╔ŽįO(sh©©)ų├╦«Ä¦����Ż¼īó╦«Ą─ē║┴”š{(di©żo)š¹×ķ0.8mpaŻ¼┐╔ęį░l(f©Ī)¼F(xi©żn)╦«┼┌Ą─ćŖ╦«ķLČ╚×ķ72├ūū¾ėę�Ż¼ūįäė(d©░ng)╗»ćŖ┴▄ŽĄĮy(t©»ng)─▄ē“┐ņ╦┘ķ_åóŻ¼┐╔ęįėąą¦▀M(j©¼n)ąąĮĄ£ž��ĪŻ
ĪĪĪĪ
2.2 Š▀¾wĄ─æ¬(y©®ng)ė├
ĪĪĪĪ
īŹ(sh©¬)ļH▓┘ū„Ą─▀^│╠ųąŽ┬╬╗ÖC(j©®)š¹¾w╝▄śŗ(g©░u)ų„ę¬╩Ūė╔┐žųŲ░Õ▓┐Ęų����ĪółDŲ¼ęĢŅlé„▌ö─ŻēKĪóé„ĖąŲ„▓┐Ęų�����ĪóļŖÖC(j©®)“ī(q©▒)äė(d©░ng)▓┐Ęų║═ļŖį┤ļŖē║Öz£y─ŻēK▓┐Ęų╦∙ĮM║ŽČ°│╔ĪŻų„ę¬╣”─▄Š═╩Ū▀M(j©¼n)ąą╔Ž╬╗ÖC(j©®)▓┘ū„öĄ(sh©┤)ō■(j©┤)ą┼Žó║═ą┼╠¢Ą─ūx╚Ī�Ż¼£╩(zh©│n)┤_ėŗ(j©¼)╦Ń┐žųŲ┴┐öĄ(sh©┤)ō■(j©┤)Ż¼īóPWMą┼╠¢▌ö│÷é„╦═ĄĮļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ų„ŽĄĮy(t©»ng)��Ż¼ī”╦«┼┌įO(sh©©)éõ║═įŲ┼_įO(sh©©)éõĄ─╣żū„▀M(j©¼n)ąą┐žųŲ��ĪŻ┼c┤╦═¼Ģr(sh©¬)�Ż¼▀M(j©¼n)ąą▓╗═¼é„ĖąŲ„öĄ(sh©┤)ō■(j©┤)ą┼ŽóĄ─ūx╚ĪŻ¼é„▌ö?sh©┤)Į╔Ž╬╗ÖC(j©®)ŽĄĮy(t©»ng)���Ż¼░┤ššé„ĖąŲ„╦∙Öz£yĄ─╦«┼┌╦«ē║öĄ(sh©┤)ō■(j©┤)��Īó▄ć▌vŪ░║¾šŽĄKŠÓļxöĄ(sh©┤)ō■(j©┤)���Īó▄ć¾wāAą▒ĮŪČ╚öĄ(sh©┤)ō■(j©┤)Īó▄ć¾w£žČ╚Ż©╬┤═Ļ�Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|