|
ÖC(j©®)ąĄ▒█┬ĘÅĮ╠žš„³c(di©Żn)─┐ś╦(bi©Īo)▄ē█EęÄ(gu©®)äØ╝░īŹ(sh©¬)“×(y©żn)Ęų╬÷
ÅłÜJĪĪ2023/9/16 18:35:04
Ż©Įė╔ŽĒō(y©©)Ż®Ė·█Ö─┐ś╦(bi©Īo)▄ē█Eą¦┬╩���Ż¼įO(sh©©)ėŗ(j©¼)┴╦ę╗ĘN╗∙ė┌┬ĘÅĮ╠žš„³c(di©Żn)╦ŃĘ©Ą─ÖC(j©®)ąĄ▒█Ė·█Ö─┐ś╦(bi©Īo)▄ē█Eā×(y©Łu)╗»ĘĮĘ©ĪŻ▀xō±ŽÓŲĮ├µĘ©įO(sh©©)ų├╦┘Č╚Ū·ŠĆ(xi©żn)�Ż¼└¹ė├ŽÓŲĮ├µĘ©š{(di©żo)╣Ø(ji©”)Ą─ĘĮ╩Į╩╣╦ŃĘ©▀_(d©ó)ĄĮĖ³Ė▀╠Ä└Ēą¦┬╩ĪŻ
ĪĪĪĪ
2 ┬ĘÅĮ╠žš„³c(di©Żn)╦ŃĘ©
ĪĪĪĪ
«ö(d©Īng)įO(sh©©)ų├╬╗ū╦Ž“┴┐Ą─ą“┴ą╠½ąĪĢr(sh©¬)ät¤o(w©▓)Ę©╚½├µ▒Ż┴¶─┐ś╦(bi©Īo)▄ē█E���Ż¼įņ│╔ę╗Č©│╠Č╚Ą─╩¦šµ─▄[7-8]�����ĪŻę“┤╦Ė∙ō■(j©┤)─┐ś╦(bi©Īo)▄ē█E┬ĘÅĮÅ═(f©┤)ļsąį║═äė(d©░ng)┴”īW(xu©”)─Żą═üĒ(l©ói)╠ß╚Ī½@Ą├─┐ś╦(bi©Īo)▄ē█E┬ĘÅĮģóöĄ(sh©┤)����Ż¼▀M(j©¼n)ąą┬ĘÅĮģóöĄ(sh©┤)ėŗ(j©¼)╦ŃĢr(sh©¬)ät═©▀^(gu©░)─Ż║²═Ų└ĒĄ─ĘĮ╩Į═Ļ│╔���Ż¼░┤ššĄ╚ķgŠÓĄ─Śl╝■Ą├ĄĮ┬ĘÅĮ╠žš„ģóöĄ(sh©┤)����ĪŻ
ĪĪĪĪ
▒ŠīŹ(sh©¬)“×(y©żn)ųąįO(sh©©)Č©sŻĮ1ęį╝░sĪ¦ŻĮ1�����Ż¼ĮY(ji©”)║Ž╠ō╣”ėŗ(j©¼)╦ŃęÄ(gu©®)ät┤_Č©æTąį┴”Ž“┴┐����Ż¼ėŗ(j©¼)╦Ń╩Į╚ńŽ┬Ż║
ĪĪĪĪ

ĪĪĪĪ
╩Įųą���Ż¼M(q)×ķÖC(j©®)ąĄ▒█æTąįŠžĻćŻ╗q×ķÖC(j©®)ąĄ▒█ĻP(gu©Īn)╣Ø(ji©”)Ž“┴┐����Ż╗J(q)×ķč┼┐╔▒╚ŠžĻćŻ╗f×ķ┬ĘÅĮģóöĄ(sh©┤)s┼cÖC(j©®)ąĄ▒█─®Č╦╬╗ū╦pĄ─ė│╔õ║»öĄ(sh©┤)�����ĪŻ
ĪĪĪĪ
Į©┴óųž┴”╝ė╦┘Č╚Ž“┴┐╚ńŽ┬Ż║
ĪĪĪĪ

ĪĪĪĪ
╩Įųą�Ż¼Z×ķÖC(j©®)ąĄ▒█▀\(y©┤n)äė(d©░ng)īW(xu©”)š²ĮŌ▀\(y©┤n)╦Ń���ĪŻ
ĪĪĪĪ
3 īŹ(sh©¬)“×(y©żn)
ĪĪĪĪ
3.1 īŹ(sh©¬)“×(y©żn)ĘĮ░Ė
ĪĪĪĪ
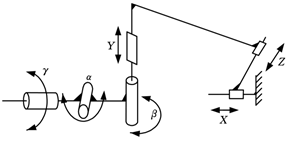
▒ŠīŹ(sh©¬)“×(y©żn)▀xō±┐╔ęįīŹ(sh©¬)¼F(xi©żn)┴∙ūįė╔Č╚┐žųŲĄ─╣źĮŪÖC(j©®)ąĄ▒█ū„×ķ£y(c©©)įćī”(du©¼)Ž¾£y(c©©)Č©┴╦▄ē█EęÄ(gu©®)äØ╦ŃĘ©╠Ä└Ēą¦┬╩┼c┐╔┐┐ąį�ĪŻłD1×ķÖC(j©®)ąĄ▒█Ą─Š▀¾wĮY(ji©”)śŗ(g©░u)����Ż¼▒Ē1Įo│÷┴╦▓╗═¼ūįė╔Č╚Ž┬ī”(du©¼)æ¬(y©®ng)Ą─┴”Šž/ļŖ┴„┼c╦┘Č╚╝s╩°Śl╝■ĪŻ
ĪĪĪĪ
PCŽĄĮy(t©»ng)═©▀^(gu©░)╚╦ÖC(j©®)Į╗╗źĮń├µ▄ø╝■▀M(j©¼n)ąą▀\(y©┤n)ąąĀŅæB(t©żi)▒O(ji©Īn)┐žĢr(sh©¬)įO(sh©©)ų├┴╦MATLABĮė┐┌üĒ(l©ói)īŹ(sh©¬)¼F(xi©żn)▄ē█Eš{(di©żo)ė├[9]��ĪŻ═©▀^(gu©░)╣ż┐žÖC(j©®)š{(di©żo)╣Ø(ji©”)ÖC(j©®)ąĄ▒█▄ø╝■│╠ą“?q©▒)Ź¼F(xi©żn)äė(d©░ng)ū„┐žųŲ╣”─▄�����Ż¼┐╔ęįŠ½┤_š{(di©żo)╣Ø(ji©”)ÖC(j©®)ąĄ▒█╬╗ų├ģóöĄ(sh©┤)▓ó▓╔╝»ĻP(gu©Īn)╣Ø(ji©”)╦┘Č╚ĪóļŖ┴„Ą╚ą┼Žó[10]��ĪŻį┌╣ż┐žÖC(j©®)ųą▀\(y©┤n)ąąÖC(j©®)ąĄ▒█▄ø╝■�Ż¼īŹ(sh©¬)¼F(xi©żn)╬╗ų├┼c╦┘Č╚Ą─š{(di©żo)╣Ø(ji©”)▓ó╩╣ŲõĄĮ▀_(d©ó)ųĖČ©▓┐╬╗Ż¼═¼Ģr(sh©¬)▓╔╝»½@Ą├ļŖ┴„�Īó╦┘┬╩ģóöĄ(sh©┤)ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD1ÖC(j©®)ąĄ▒█ĮY(ji©”)śŗ(g©░u)╩ŠęŌłD
ĪĪĪĪ
▒Ē1ĻP(gu©Īn)╣Ø(ji©”)╝s╩°▒Ē
ĪĪĪĪ
ģóöĄ(sh©┤) X Y Z ”┴ ”┬ ”├
ĪĪĪĪ
▌ö│÷ļŖ┴„Ž▐ųŲ(A) 24 48
ĪĪĪĪ
╦┘Č╚Ž▐ųŲ(mm/s)╗“(ĪŃ/s) 225 30
ĪĪĪĪ
3.2 ╦ŃĘ©ėąą¦ąį
ĪĪĪĪ
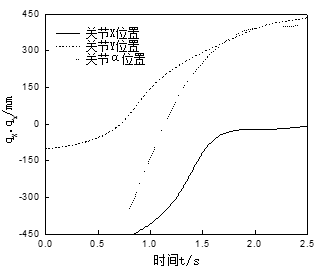
▓╗═¼Ģr(sh©¬)ķgŽ┬Ą─ÖC(j©®)ąĄ▒█ūįė╔Č╚ĻP(gu©Īn)╣Ø(ji©”)╬╗ų├ūā╗»ĮY(ji©”)╣¹ęŖ(ji©żn)łD2╦∙╩Š.ė╔łD2┐╔ęį┐┤ĄĮ┤╦Ģr(sh©¬)ą╬│╔┴╦┼cŅA(y©┤)Ų┌ŽÓĘ¹Ą─▀B└m(x©┤)Ęų▓╝ĻP(gu©Īn)╣Ø(ji©”)╬╗ų├Ū·ŠĆ(xi©żn)����Ż¼╩╣ÖC(j©®)ąĄ▒█┼c╦∙ėąĻP(gu©Īn)╣Ø(ji©”)Ģr(sh©¬)ķgą“┴ąą╬│╔Š½┤_Ė·█ÖĄ─ĀŅæB(t©żi)Ż¼┐╔ęįėąą¦īŹ(sh©¬)¼F(xi©żn)ÖC(j©®)ąĄ▒█“ī(q©▒)äė(d©░ng)╣”─▄�����ĪŻÖC(j©®)ąĄ▒█▒Ż│ųŠo├▄Ė·█ÖĀŅæB(t©żi)����Ż¼Xūįė╔Č╚“ī(q©▒)äė(d©░ng)ļŖ┴„┼cŅ~Č©ļŖ┴„Ą─▀ģĮńģóöĄ(sh©┤)ŽÓĮ³Ż¼ŲõėÓūįė╔Č╚Č╝▒╚Ņ~Č©ļŖ┴„▀ģĮńĖ³Ą═[11]��ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD2ĻP(gu©Īn)╣Ø(ji©”)╬╗ų├Ū·ŠĆ(xi©żn)
ĪĪĪĪ
3.3 ╦ŃĘ©ėŗ(j©¼)╦Ńą¦┬╩Ęų╬÷
ĪĪĪĪ
3.3.1┬ĘÅĮ╠žš„³c(di©Żn)öĄ(sh©┤)─┐?j©®)?y©Łu)╗»
ĪĪĪĪ
ø](m©”i)ėą▀xō±┬ĘÅĮ╠žš„³c(di©Żn)╦ŃĘ©Ą─Śl╝■Ž┬���Ż¼ė╔┬ĘÅĮ╠žš„³c(di©Żn)ĮM│╔ą“┴ą╝»���Ż¼═¼Ģr(sh©¬)╩▄ĄĮ┬ĘÅĮĄ─Å═(f©┤)ļsąį┼cÖC(j©®)ąĄ▒█Ą─ĘŪŠĆ(xi©żn)ąįĮY(ji©”)śŗ(g©░u)ė░Ēæ[12]�����ĪŻ╠žš„³c(di©Żn)╦ŃĘ©Ģr(sh©¬)üĒ(l©ói)ęÄ(gu©®)äØÅ═(f©┤)ļs─┐ś╦(bi©Īo)▄ē█EĢr(sh©¬)╦∙ąĶĄ─ėŗ(j©¼)╦Ń║─Ģr(sh©¬)ĮY(ji©”)╣¹ęŖ(ji©żn)łD2╦∙╩Š�ĪŻė╔łD2┐╔ų¬���Ż¼ļSų°┬ĘÅĮ³c(di©Żn)öĄ(sh©┤)┴┐į÷╝ė║¾��Ż¼Ģ■(hu©¼)ī¦(d©Żo)ų┬╦ŃĘ©Ģr(sh©¬)ķgĄ─├„’@čėķL(zh©Żng)�Ż¼įO(sh©©)ų├╠½ČÓ┬ĘÅĮ³c(di©Żn)öĄ(sh©┤)┴┐Ą─Śl╝■Ž┬ęį┬ĘÅĮ╠žš„³c(di©Żn)╦ŃĘ©╠Ä└ĒĢr(sh©¬)┐╔ęįīŹ(sh©¬)¼F(xi©żn)╦ŃĘ©ą¦┬╩Ą─’@ų°╠ß╔²��ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD9ĪĪ╦ŃĘ©ą¦┬╩Įy(t©»ng)ėŗ(j©¼)
ĪĪĪĪ
▄ē█EęÄ(gu©®)äØ╦ŃĘ©ėŗ(j©¼)╦ŃĢr(sh©¬)ķgĮy(t©»ng)ėŗ(j©¼)ĮY(ji©”)╣¹ęŖ(ji©żn)▒Ē2╦∙╩Š�����ĪŻī”(du©¼)▒Ē2ĮY(ji©”)╣¹▀M(j©¼n)ąąĘų╬÷┐╔ęį░l(f©Ī)¼F(xi©żn)��Ż¼╬┤ā×(y©Łu)╗»Ą─Śl╝■Ž┬▓╔╝»Ą├ĄĮĄ─ČÓųž╝s╩°ūŅ┤¾╦┘Č╚Ū·ŠĆ(xi©żn)š╝ė├┴╦ūŅ┤¾▒╚└²Ą─╠Ä└ĒĢr(sh©¬)ķg���Ż¼ė╚Ųõ╩Ū╠Ä└ĒÅ═(f©┤)ļs─┐ś╦(bi©Īo)▄ē█EęÄ(gu©®)äØĢr(sh©¬)ŽÓī”(du©¼)║å(ji©Żn)å╬─┐ś╦(bi©Īo)▄ē█EąĶ꬚╝ė├Ė³ķL(zh©Żng)Ģr(sh©¬)ķgĪŻĮø(j©®ng)▀^(gu©░)ā×(y©Łu)╗»╠Ä└Ē║¾Ż¼ČÓųž╝s╩°ūŅ┤¾╦┘Č╚Ū·ŠĆ(xi©żn)Ģr(sh©¬)ķg├„’@┐sČ╠����ĪŻęį╔ŽĮY(ji©”)╣¹▒Ē├„Ż¼ęį╝ė╦┘Č╚×ķ0Ą─╦┘Č╚Ū·ŠĆ(xi©żn)╚Ī┤·ČÓųžŪ·ŠĆ(xi©żn)Ģr(sh©¬)��Ż¼š¹éĆ(g©©)ėŗ(j©¼)╦Ń▀^(gu©░)│╠╦∙ąĶĄ─ęÄ(gu©®)äØĢr(sh©¬)ķg─▄ē“┤¾Ę∙┐sČ╠��ĪŻ
ĪĪĪĪ
▒Ē2▄ē█EęÄ(gu©®)äØ╦ŃĘ©ėŗ(j©¼)╦ŃĢr(sh©¬)ķg/%
ĪĪĪĪ
─┐ś╦(bi©Īo)▄ē█E T1 T2 T3
ĪĪĪĪ
ā×(y©Łu)╗»Ū░║å(ji©Żn)å╬ 21.62 79.63 0.26
ĪĪĪĪ
ā×(y©Łu)╗»Ū░Å═(f©┤)ļs 8.06 88.94 0.29
ĪĪĪĪ
ā×(y©Łu)╗»║¾║å(ji©Żn)å╬ 45.78 52.63 5.86
ĪĪĪĪ
ā×(y©Łu)╗»║¾Å═(f©┤)ļs 41.15 56.42 4.68
ĪĪĪĪ
3.3.2╦ŃĘ©ī”(du©¼)▒╚
ĪĪĪĪ
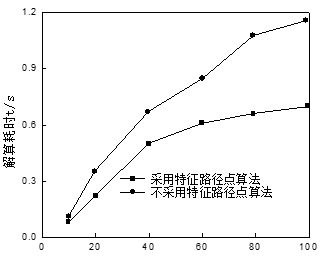
ęį▀zé„╦ŃĘ©ū„×ķī”(du©¼)▒╚ī”(du©¼)Ž¾�����Ż¼£y(c©©)įć┴╦║å(ji©Żn)å╬┼cÅ═(f©┤)ļs▄ē█E╠Ä└Ēą¦┬╩�����Ż¼ėŗ(j©¼)╦Ńą¦┬╩ĮY(ji©”)╣¹ęŖ(ji©żn)▒Ē3╦∙╩Š��ĪŻė╔▒Ē3┐╔ęį┐┤ĄĮ����Ż¼▓╔ė├▒Š╬─įO(sh©©)ėŗ(j©¼)Ą─▄ē█EęÄ(gu©®)äØ╦ŃĘ©┐╔ęį½@Ą├▒╚Ųõ╦³┬ĘÅĮęÄ(gu©®)äØ╦ŃĘ©Ė³Č╠Ą─║─Ģr(sh©¬)Ż¼Č°▀zé„╦ŃĘ©Ž¹║─┴╦ūŅķL(zh©Żng)Ą─Ģr(sh©¬)ķg�����ĪŻ
ĪĪĪĪ
▒Ē3ėŗ(j©¼)╦Ńą¦┬╩ĮY(ji©”)╣¹ī”(du©¼)▒╚
ĪĪĪĪ
ģóöĄ(sh©┤) ┬ĘÅĮ³c(di©Żn)╦ŃĘ© ▀zé„╦ŃĘ©
ĪĪĪĪ
║å(ji©Żn)å╬─┐ś╦(bi©Īo)▄ē█E 0.415 3.462
ĪĪĪĪ
Å═(f©┤)ļs─┐ś╦(bi©Īo)▄ē█E 0.598 6.896
ĪĪĪĪ
Ū·ŠĆ(xi©żn)ęÄ(gu©®)äØŻ©╬┤═ĻŻ¼Ž┬ę╗Ēō(y©©)Ż®
ĪĪĪĪ
|