|
GRAPHŠÄ│╠šZčįį┌╬„ķTūėPLCųąĄ─æ¬(y©®ng)ė├
ĖČĮ©▒“ Åł▀h(yu©Żn)├ĘĪĪ2024/1/3 20:36:18
ĪĪĪĪ Ż©ÅV¢|╩ĪÄX─Ž╣ż╔╠Ą┌ę╗╝╝ĤīW(xu©”)į║ ÅV¢|ÄX─Ž 510800Ż®
ĪĪĪĪ
ĪĪĪĪ
š¬ę¬Ż║S7-GRAPHŠÄ│╠šZčį╩Ū╬„ķTūėPLCĄ─ę╗ĘNĒśą“╣”─▄łDŠÄ│╠šZčį���Ż¼▀mė├ė┌Ēśą“▀ē▌ŗ┐žųŲŽĄĮy(t©»ng)Ż¼į┌╚š│ŻĄ─╣żśI(y©©)╔·«a(ch©Żn)┐žųŲŽĄĮy(t©»ng)ųą┤¾▓┐ĘųĄ─┐žųŲČ╝╩ŪĒśą“▀ē▌ŗ┐žųŲ,╩ņŠÜ▀\ė├GRAPHŠÄ│╠šZčį▀Mąą│╠ą“įO(sh©©)ėŗ┼cŠÄ│╠─▄┤¾┤¾£pąĪÅ═(f©┤)ļs┐žųŲŽĄĮy(t©»ng)│╠ą“įO(sh©©)ėŗĄ─ļyČ╚�����Ż¼ę“┤╦īW(xu©”)║├GRAPHŠÄ│╠šZčįī”│╠ą“įO(sh©©)ėŗš▀Č°čį’@Ą├ĘŪ│Żųžę¬ĪŻį┌╬„ķTūėPLCųąS7-300��ĪóS7-400���ĪóS7-1500Ą╚PLCČ╝ōĒėąGRAPHŠÄ│╠šZčįŠÄ│╠╣”─▄��Ż¼▒Š╬─ßśī”GRAPHŠÄ│╠šZčįĄ─╠ž³c╝░Ųõį┌įO(sh©©)ėŗĒśą“▀ē▌ŗ┐žųŲ│╠ą“ųąĄ─▀\ė├▀MąąĻU╩÷���Ż¼═©▀^▀\ė├GRAPHŠÄ│╠šZčį─▄ėąą¦ĮĄĄ═│╠ą“įO(sh©©)ėŗĄ─ļyČ╚Ż¼Å─Č°╠ßĖ▀ŠÄ│╠ą¦┬╩�ĪŻ
ĪĪĪĪ
ĻP(gu©Īn)µIį~Ż║S7-GRAPHŻ╗╬„ķTūėPLC���Ż╗Ēśą“▀ē▌ŗ┐žųŲ����Ż╗╣żśI(y©©)╔·«a(ch©Żn)�Ż╗│╠ą“įO(sh©©)ėŗ
ĪĪĪĪ
ĪĪĪĪ
Ū░čįŻ║į┌╚š│ŻĄ─╣żśI(y©©)╔·«a(ch©Żn)┐žųŲŽĄĮy(t©»ng)ųą���Ż¼┤¾▓┐ĘųĄ─┐žųŲČ╝╩ŪĒśą“▀ē▌ŗ┐žųŲ���ĪŻ╦∙ų^Ēśą“▀ē▌ŗ┐žųŲŻ║╝┤░┤šš╔·«a(ch©Żn)╣ż╦ćŅA(y©┤)Ž╚ęÄ(gu©®)Č©Ą─Ēśą“����Ż¼į┌Ė„éĆ▌ö╚ļą┼╠¢Ą─ū„ė├Ž┬����Ż¼Ė∙ō■(j©┤)ā╚(n©©i)▓┐ĀŅæB(t©żi)║═ĢrķgĒśą“Ż¼į┌╔·«a(ch©Żn)▀^│╠ųąĄ─Ė„éĆł╠(zh©¬)ąąÖCśŗ(g©░u)ūįäėĄž����Īóėąą“Ąž▀Mąą▓┘ū„ĪŻS7-GRAPHŠÄ│╠šZčįŠ═╩Ūę╗ĘNĒśą“╣”─▄łDŠÄ▌ŗšZčį�����Ż¼╦³ŅÉ╦Ųė┌╣żū„┴„│╠łDĄ─ŠÄ│╠��Ż¼└¹ė├GRAPHŠÄ│╠šZčį▀Mąą│╠ą“ŠÄ│╠ŽÓī”▒╚▌^ĘĮ▒Ń����Ż¼│╠ą“ŠÄ│╠ę▓▌^╚▌ęū└ĒĮŌŻ¼ę“┤╦GRAPHŠÄ│╠šZčįĄ─▀\ė├ī”│╠ą“įO(sh©©)ėŗš▀Č°čį’@Ą├ĘŪ│Żųžę¬����ĪŻ▒Š╬─ßśī”Ēśą“▀ē▌ŗ┐žųŲĄ─╠ž³cŻ¼ĮY(ji©”)║ŽĮ╠īW(xu©”)īŹ└²Ż║Ī░ÖCąĄäė┴”Ņ^┐žųŲŽĄĮy(t©»ng)Ī▒ū„×ķ░Ė└²▀Mąą╠Įėæšf├„Ż¼╚ń║╬└¹ė├GRAPHŠÄ│╠šZčįīŹ¼F(xi©żn)ī”Ēśą“▀ē▌ŗ┐žųŲĄ─│╠ą“ŠÄīæ����ĪŻ
ĪĪĪĪ
ę╗ĪóS7-GRAPHŠÄ│╠šZčį║åĮķ
ĪĪĪĪ
S7-GRAPHŠÄ│╠šZčį╩Ū╬„ķTūėPLCĄ─ę╗ĘNĒśą“╣”─▄łDŠÄ│╠šZčį�����Ż¼įōŠÄ│╠šZčį▀mė├ė┌Ēśą“▀ē▌ŗ┐žųŲŽĄĮy(t©»ng)��Ż¼į┌╬„ķTūėS7-300�ĪóS7-400ĪóS7-1500Ą╚PLCųąČ╝ōĒėąGRAPHŠÄ│╠šZčį╣”─▄�ĪŻČ°į┌╬„ķTūė▓®łDŠÄ│╠▄ø╝■ųąŻ¼ų╗ėąį┌FB║»öĄ(sh©┤)ēK└’▓┼─▄╩╣ė├GRAPHŠÄ│╠šZčį▀MąąŠÄ│╠��ĪŻŲõųąGRAPHŠÄ│╠Įń├µ×ķłDą╬Įń├µ��Ż¼─▄ūīįO(sh©©)ėŗš▀Ė³ų▒ė^Ą─▓ķ┐┤╝░Ęų╬÷Ųõ┐žųŲ╣”─▄Ēśą“�����ĪŻį┌GRAPHŠÄ│╠┐žųŲųąūŅČÓėą8éĆĒś┐žŲ„���Ż¼├┐éĆĒś┐žŲ„ūŅČÓ250éĆ▓Į¾EŻ¼├┐éĆ▓Į¾EūŅČÓ100éĆäėū„Ż¼├┐éĆĒś┐žŲ„ūŅČÓ250éĆ▐D(zhu©Żn)ōQŚl╝■╝░250éĆĘųų¦Śl╝■Ą╚��ĪŻ
ĪĪĪĪ
Č■���ĪóĒśą“╣”─▄łDĄ─╠ž³c
ĪĪĪĪ
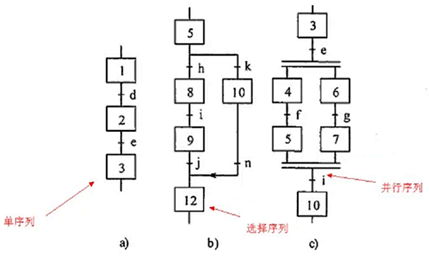
1.Ēśą“╣”─▄łDĄ─╗∙▒ŠĮY(ji©”)śŗ(g©░u)Ęų×ķęįŽ┬╚²ĘN���Ż¼╚ńŽ┬łD1╦∙╩ŠŻ║
ĪĪĪĪ
Ż©1Ż®å╬ą“┴ąĮY(ji©”)śŗ(g©░u)Ż║å╬ą“┴ą╣”─▄łDĄ─┴„│╠ų╗ėąę╗┬ĘŻ¼├┐ę╗▓ĮĄ─║¾├µų╗ėąę╗éĆ▐D(zhu©Żn)ōQ�����Ż¼├┐éĆ▐D(zhu©Żn)ōQ║¾├µų╗ėąę╗éĆ▓Į���ĪŻ
ĪĪĪĪ
Ż©2Ż®▀xō±ąįą“┴ąĮY(ji©”)śŗ(g©░u)Ż║«ö(d©Īng)╣”─▄łDĄ─┴„│╠«a(ch©Żn)╔·Ęųų¦Ģr�����Ż¼▒Ńą╬│╔▀xō±ą“┴ą����ĪŻį┌▀xō±ą“┴ąĄ─Ęųų¦╠Ä▐D(zhu©Żn)ōQĘ¹ų╗─▄ś╦(bi©Īo)į┌╦«ŲĮŠĆų«Ž┬����Ż¼▀xō±ą“┴ąĄ─ĮY(ji©”)╩°ĘQ×ķ║Ž▓ó���Ż¼▐D(zhu©Żn)ōQĘ¹ų╗─▄ś╦(bi©Īo)į┌╦«ŲĮŠĆų«╔ŽĪŻ
ĪĪĪĪ
Ż©3Ż®▓óąąąįą“┴ąĮY(ji©”)śŗ(g©░u)Ż║«ö(d©Īng)▐D(zhu©Żn)ōQī¦(d©Żo)ų┬ÄūéĆą“┴ą═¼Ģr▒╗╝ż╗ŅĢr���Ż¼▀@ą®ą“┴ąĘQ×ķ▓óąąą“┴ą����ĪŻ×ķÅŖš{(di©żo)▐D(zhu©Żn)ōQĄ─═¼▓ĮīŹ¼F(xi©żn)����Ż¼╦«ŲĮ▀BŠĆė├ļpŠĆ’@╩ŠŻ¼Ūę╦«ŲĮŠĆ╔Žų╗į╩įSę╗éĆ▐D(zhu©Żn)ōQĘ¹����ĪŻ
ĪĪĪĪ
ĪĪĪĪ
łD1-Ēśą“╣”─▄łDĮY(ji©”)śŗ(g©░u)łD
ĪĪĪĪ
2.Ēśą“╣”─▄łDł╠(zh©¬)ąąęÄ(gu©®)ätŻ║
ĪĪĪĪ
Ż©1Ż®▓ĮĄ─ķ_╩╝Ż║├┐éĆĒśą“╣”─▄łDČ╝╩Ūęįę╗éĆ│§╩╝▓Į╗“š▀ČÓéĆ╬╗ė┌Ēśą“╣”─▄łD╚╬ęŌ╬╗ų├Ą─│§╩╝▓Įķ_╩╝Ą─ĪŻ
ĪĪĪĪ
Ż©2Ż®ę╗éĆ╝ż╗Ņ▓ĮĄ─═╦│÷Ż║╚╬ęŌ╝ż╗ŅĄ─Ė╔ö_�Ż¼╚ń╗źµiŚl╝■Ą─Ž¹│²╗“┤_šJ(r©©n)Ż¼▓óŪęų┴║¾└m(x©┤)▓ĮĄ─▐D(zhu©Żn)ōQŚl╝■ØMūŃĢr�Ż¼╝ż╗Ņ▓ĮŠ══╦│÷ĪŻ
ĪĪĪĪ
Ż©3Ż®ØMūŃ▐D(zhu©Żn)ōQŚl╝■Ą─║¾└m(x©┤)▓Į▒╗╝ż╗Ņ�ĪŻ
ĪĪĪĪ
Ż©4Ż®Ēś┐žŲ„Ą─ĮY(ji©”)╩°╬╗ų├Ą─╠Ä└ĒŻ║╚ńėąę╗éĆ╠°▐D(zhu©Żn)ųĖ┴ŅŻ¼ųĖŽ“▒ŠĒś┐žŲ„Ą─╚╬ęŌ▓Į���Ż¼╗“š▀Ųõ╦¹Ēś┐žŲ„����Ż¼┤╦ųĖ┴Ņ┐╔ęįīŹ¼F(xi©żn)Ēś┐žŲ„Ą─裣h(hu©ón)▓┘ū„��ĪŻ
ĪĪĪĪ
Ż©5Ż®╝ż╗ŅĄ─▓ĮŻ║╝ż╗ŅĄ─▓Į╩Ūę╗éĆ«ö(d©Īng)Ū░ūį╔ĒĄ─äėū„š²į┌▒╗ł╠(zh©¬)ąąĄ─▓Į�ĪŻ
ĪĪĪĪ
╚²ĪóGRAPHŠÄ│╠šZčįį┌īŹ└²Į╠īW(xu©”)ųąĄ─æ¬(y©®ng)ė├
ĪĪĪĪ
1.▒Š╬─ęįĮ╠īW(xu©”)īŹ└²ųąĄ─╣żśI(y©©)ÖCąĄäė┴”Ņ^┐žųŲŽĄĮy(t©»ng)×ķ└²�����Ż¼▀\ė├GRAPHŠÄ│╠šZčį▀Mąą│╠ą“įO(sh©©)ėŗ����Ż¼═©▀^GRAPHŠÄ│╠šZčįĄ─▀\ė├─▄▌^║├Ą─īŹ¼F(xi©żn)Ųõ┐žųŲę¬Ū¾│╠ą“Ą─ŠÄīæŻ¼┤¾┤¾£pąĪ┴╦īW(xu©”)╔·į┌│╠ą“įO(sh©©)ėŗ╝░│╠ą“ŠÄīæĢrĄ─ļyČ╚�����Ż¼ī”īW(xu©”)╔·▀Mąą│╠ą“└ĒĮŌ╝░│╠ą“ŠÄ│╠ėą║▄║├Ą─Į╠īW(xu©”)ą¦╣¹���ĪŻŲõųą�Ż¼ÖCąĄäė┴”Ņ^┐žųŲäėū„╩ŠęŌłD╚ńŽ┬łD2╦∙╩ŠŻ║
ĪĪĪĪ

ĪĪĪĪ
łD2 ÖCąĄäė┴”Ņ^┐žųŲäėū„╩ŠęŌłD
ĪĪĪĪ
ÖCąĄäė┴”Ņ^┐žųŲę¬Ū¾Ż║
ĪĪĪĪ
Ż©1Ż®įō┐žųŲėą╩ųäė┐žųŲ║═ūįäė┐žųŲā╔ĘN▀\ąą─Ż╩Į���Ż¼ė╔▐D(zhu©Żn)ōQķ_ĻP(gu©Īn)SAīŹ¼F(xi©żn)─Ż╩ĮŪąōQ��Ż╗
ĪĪĪĪ
Ż©2Ż®╩ųäė─Ż╩ĮŽ┬��Ż¼┐╔ęįĘųäe▀MąąŻ║┐ņ▀M�Īó╣ż▀MĪó┐ņ═╦�����Īó£p╦┘Ą╚▓┘ū„�Ż╗
ĪĪĪĪ
Ż©3Ż®ūįäė─Ż╩ĮŽ┬Ż¼ÖCąĄäė┴”Ņ^į┌ÖCąĄįŁ³cŻ©ē║ūĪSQ4Ż®Ģr����Ż¼░┤Ž┬åóäė░┤ŌoŻ¼ÖCąĄäė┴”Ņ^░┤╔ŽłD2╦∙╩Šäėū„ūįäė▀Mąą▀B└m(x©┤)╣żū„���Ż╗░┤Ž┬═Żų╣░┤Ōo║¾�����Ż¼ÖCąĄäė┴”Ņ^▒žĒÜ═Ļ│╔▀@ę╗ų▄äėū„║¾▓┼─▄═ŻŽ┬üĒ�Ż╗
ĪĪĪĪ
Ż©4Ż®ÖCąĄäė┴”Ņ^Ż©╬┤═Ļ����Ż¼Ž┬ę╗ĒōŻ®
ĪĪĪĪ
|